
The ATmega168 project is a continuation of devices with DMX interface designed for set designers, people involved in the setting of events, musicians, etc. Our controller is able to control four servos, with which you can, for example, control lighting or animated elements of the scenery. After the transmission decay, the servos may be in their last state or assume the previously programmed default position. Recommendations: the cheesecake will be useful for moving objects on stage, switching filters or shutters in spotlights, controlling them or controlling valves.
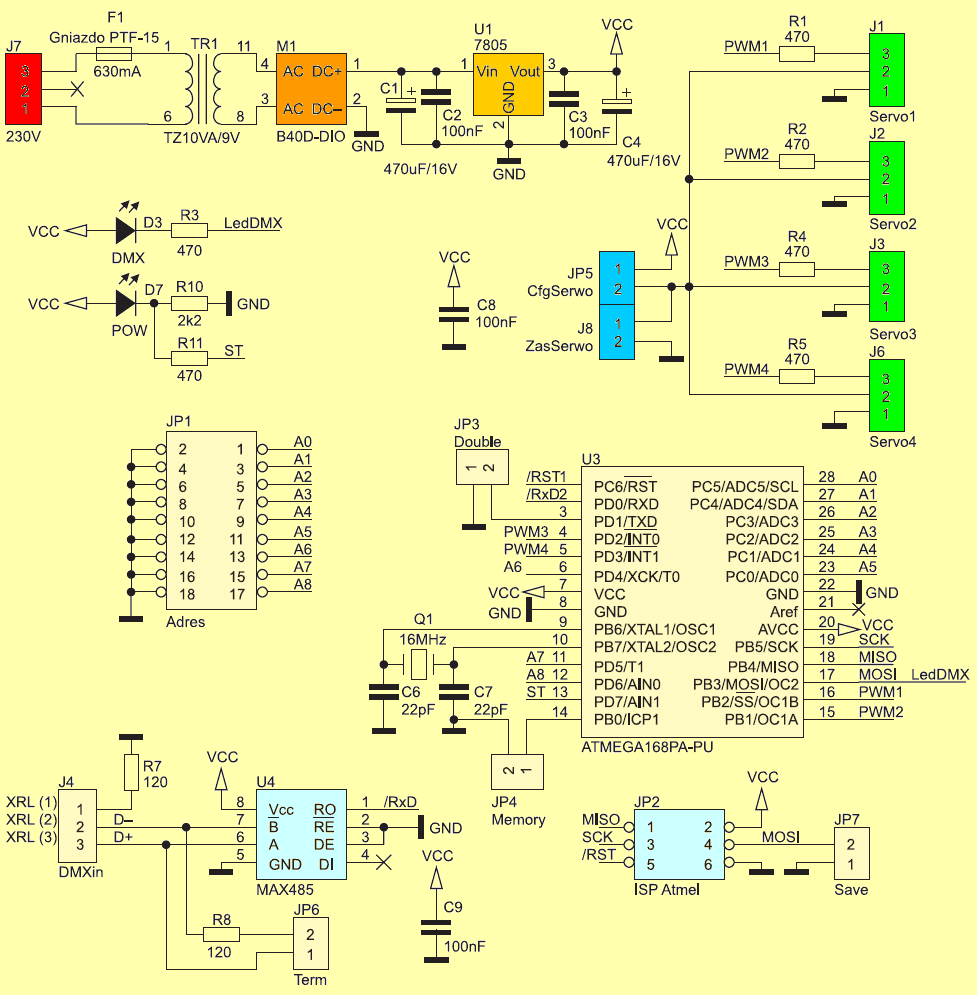
It can also supply servomechanisms (JP5 jumper installed), but you must be aware that depending on the type and load, servomotors can draw a current greater than 1 A. In this case, provide the appropriate supply voltage, for example in the range of 4 … 6 V, with appropriate current capacity to J8 connector and remove the JP5 jumper. DMX data is converted to TTL levels using the U4 chip. The JP6 jumper enables attachment of line terminators.
JP1 sets the DMX address. Please note that the driver occupies four consecutive addresses. U3 decodes DMX data and generates impulses for servos. Pulses are generated in Timer 1 interrupts. The most important fragment of the initialization procedure is shown in Listing 1. Listing 2 contains the procedure for generating pulses for servos and a synchronization break.
ATmega168 The program uses Timer 0 to count the timeout of no transmission. If the commands do not reach for more than 1 second, the servos are set to the last position or will take the default position, stored in EEPROM.
DMX servo driver circuit schematic diagram
![]()
FILE DOWNLOAD LINK LIST (in TXT format): LINKS-26489a.zip

Circuit de pilote de servomoteur DMX Le projet ATmega168 est une continuation d'appareils avec interface DMX conçus pour les scénographes, les personnes impliquées dans le cadre d'événements, les musiciens, etc. Notre contrôleur est capable de contrôler quatre servos, avec lesquels vous pouvez, par exemple, contrôler l'éclairage ou des éléments animés du paysage. Après la décroissance de la transmission, les servos peuvent être dans leur dernier état ou prendre la position par défaut précédemment programmée. Recommandations: le cheesecake sera utile pour déplacer des objets sur scène, commuter des filtres ou des volets dans des projecteurs, les contrôler ou contrôler des valves. Il peut également fournir des servomécanismes (cavalier JP5 installé), mais vous devez être conscient qu'en fonction du type et de la charge, les servomoteurs peuvent tirer un courant supérieur à 1 A. Dans ce cas, fournissez la tension d'alimentation appropriée, par exemple dans la plage de 4… 6 V, avec une capacité de courant appropriée au connecteur J8 et retirez le cavalier JP5. Les données DMX sont converties en niveaux TTL à l'aide de la puce U4. Le cavalier JP6 permet de fixer des terminaisons de ligne.