EMG Processing Arduino Focused on the design of active hand prosthesis. This work summarizes upper limb anatomy with focus on forearm. Subsequently, it deals with amputation techniques and indications for amputations. The part describing contemporary prostheses is important for the design of active forearm prosthesis, which is described in the third and fourth chapters. The system processes biosignals using instrumentation amplifiers. The signals are evaluated by Arduino development board, which mediates servomotor control.
After a useful signal is obtained from both muscles, it is necessary to evaluate it. Evaluation is made by Arduino NANO development board, especially for its compact design size. Arduino versions of UNO and NANO.. This is an opensource project based on ATMega328 microprocessor. Arduino can be programmed in C or C ++, but it is best to use the Wiring library, which is very widespread.
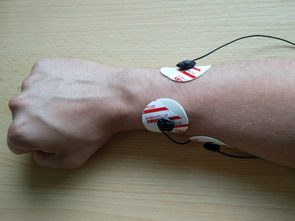
The introductory part of the thesis describes the anatomy of the upper limb, especially the forearm muscles. The second chapter is devoted to amputation techniques, indications for amputation and prosthetic replacements upper ends. Based on these findings we are active in the design forearm prostheses. The main part of the thesis deals with the design of equipment for scanning, processing and evaluation electromyographic signals. The signals are scanned from two muscles by 5 electrodes. There are two measuring electrodes per common muscle and one common reference electrode.
Arduino UNO EMG Processing
EMG Signal processing is solved by hardware. Electrodes are connected to instrument inputs of amplifiers. Two signals are generated – two channels. Using analog active filter is obtained useful bandwidth in the range of 20 to 500 Hz. The signals are further amplified and rectified in two ways. The pre-processed signals are sampled by the AD converter of the development board Arduino. From the sampled signals, the median filter generates curves from which muscle activity is apparent. The curves are compared with the threshold values. When they are exceeded, a certain event (clamping – jaw opening, rotation) is induced jaw right – left).
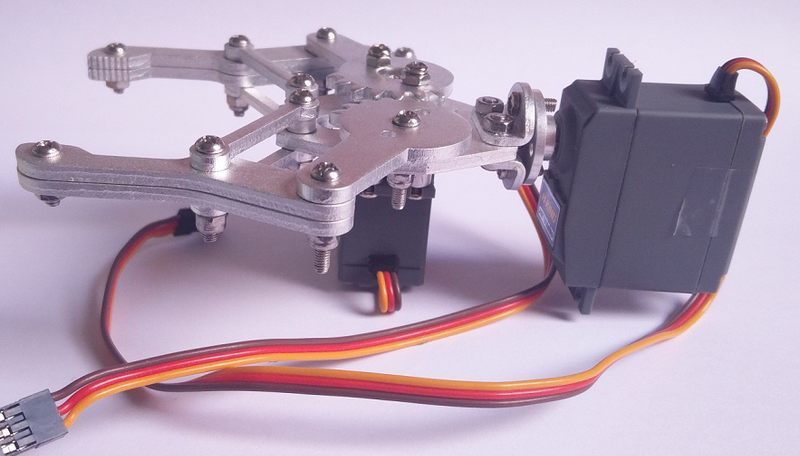
The terminal aid was chosen of the jaw type. Its movement is taken care of by a couple servomotors. The selected servomotors are strong and fast enough. Working aid it is not very aesthetic but has a very good grip and strength. The device is powered by two battery packs. The first power supply supplies development Arduino board, the second directly servomotors. Instrument and operational amplifiers are powered by symmetrical voltage. Because the servomotors are powered directly, it is possible to replace the terminal aid for better or stronger regardless of the rest system. The proposed device was implemented in hardware and software. To verify functionality was tested by five helper. Each helper learned to move terminal a tool, but at different times. This finding corresponds to the practice where modern hi-tech prosthetic equipment teaches users to control months to one year.

![]()
Eagle pcb, arduino code, filter winzard
FILE DOWNLOAD LINK LIST (in TXT format): LINKS-26255.zip



Arduino EMG Processing
EMG Processing Arduino Focused on the design of active hand prosthesis. This work summarizes upper limb anatomy with focus on forearm. Subsequently, it deals with amputation techniques and indications for amputations. The part describing contemporary prostheses is important for the design of active forearm prosthesis, which is described in the third and fourth chapters. The system processes biosignals using instrumentation amplifiers. The signals are evaluated by Arduino development board, which mediates servomotor control.
After a useful signal is obtained from both muscles, it is necessary to evaluate it. Evaluation is made by Arduino NANO development board, especially for its compact design size. Arduino versions of UNO and NANO.. This is an opensource project based on ATMega328 microprocessor. Arduino can be programmed in C or C ++, but it is best to use the Wiring library, which is very widespread.
The introductory part of the thesis describes the anatomy of the upper limb, especially the forearm muscles. The second chapter is devoted to amputation techniques, indications for amputation and prosthetic replacements upper ends. Based on these findings we are active in the design forearm prostheses. The main part of the thesis deals with the design of equipment for scanning, processing and evaluation electromyographic signals. The signals are scanned from two muscles by 5 electrodes. There are two measuring electrodes per common muscle and one common reference electrode.