
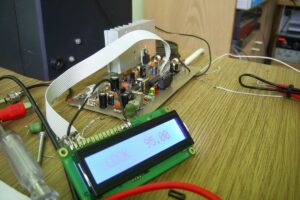
Line following robot is the thing to run on the line by controlling the motor of the left and right detected by light, such as infrared drawn in black (7m / m width or so) line. As illuminating the line, I put the light of the ordinary uses wheat balls of 3 volts instead of the infrared, we used (at the Akizuki) CDS with a diameter of 5m / m the sensor this time. The CDS ON motor twin motor gearbox controls the RB4, RB6 of port B sent to RA1, RA2 of port A of the PIC signal ON when out of the line, the signal OFF when applied to the line, and OFF. LED indicates the state.
Software is a thing of the ordinary, but is attached to the external interrupt RB0 port of B. Motor it indicates that you have entered the interrupt operation (about 30 seconds) LED stops flashing alternately once interrupt enters. The signal of the oscillation sound has placed it out of the RB7 of port B. These and there is not to the wiring, but so have been on board the bull’s-eye half board, you may want to experiment with a favorite circuit later. For example, I am such as to interrupt or light voice.
Line Follower PICmicro Project



Line Follower Robot Schematic

Source site: web1.incl.ne.jp Line Follower Robot Schematic pic assembly source code :
When compiling for the HEX file, the configuration will be as follows
.OSC RC; Oscillator type: RC
PWRT ON; Power-up timer: ON
.WDT OFF; Watchdog timer: OFF
.PROTECT OFF; Code protection: OFF
Following Robot Assembly Source Code
LIST P=16F84,R=DEC INTCON EQU H'B' STATUS EQU 3 PG EQU 5 PORTB EQU 6 PORTA EQU 5 TRISA EQU H'85' TRISB EQU H'86' PORTA_IN EQU H'11' WORK_REG EQU H'12' WORK_STATE EQU H'13' COUNTER EQU H'14' COUNTER2 EQU H'15' COUNTER3 EQU H'16' COUNTER4 EQU H'17' ;********************************** ORG 0 GOTO START ORG 4 GOTO INT ;********************************** ; ;*********************************** START BSF STATUS,PG MOVLW B'00110' MOVWF TRISA MOVLW B'00000001' MOVWF TRISB BCF STATUS,PG MOVLW B'10010000' MOVWF INTCON CLRF PORTB ;************************************ ; ;************************************ MAIN MOVF PORTA,0 MOVWF PORTA_IN MOVLW B'00110' ANDWF PORTA_IN,1 MOVLW B'00000' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO STR MOVLW B'00010' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO RSTP MOVLW B'00100' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO LSTP MOVLW B'00110' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO STP GOTO MAIN ;************************************** ; ;************************************** STR MOVLW B'01011010' MOVWF PORTB GOTO MAIN RSTP MOVLW B'00011000' MOVWF PORTB GOTO MAIN LSTP MOVLW B'01000010' MOVWF PORTB GOTO MAIN STP MOVLW B'00000000' MOVWF PORTB GOTO MAIN ;**************************************** ; Interrupt processing ;***************************************** INT MOVWF WORK_REG SWAPF STATUS,W MOVWF WORK_STATE BCF INTCON,1 CALL SAB_TAIM SWAPF WORK_STATE,W MOVWF STATUS SWAPF WORK_REG,F SWAPF WORK_REG,W RETFIE ;****************************************** ; Interrupt subroutine ;****************************************** SAB_TAIM CLRF PORTB MOVLW 20 MOVWF COUNTER2 LOOP BSF PORTB,1 MOVLW 150 MOVWF COUNTER3 DLY1 BSF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 BCF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 DECFSZ COUNTER3,1 GOTO DLY1 BCF PORTB,1 BSF PORTB,3 MOVLW 150 MOVWF COUNTER4 DLY2 BSF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 BCF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 DECFSZ COUNTER4,1 GOTO DLY2 BCF PORTB,3 DECFSZ COUNTER2,1 GOTO LOOP RETURN ;******************************************* END ;*******************************************

PIC16F877 Nixie Clock Circuit CCS C
Nixie clock circuit software 16F877 ccs c prepared by the controller based on the display indicating that circuit anyway `at 2 Lamp made with Nixie do not have any information about the project and schema files are available in source c
In response to a request from a student, I made a Nixie clock using the Nixie tube. I have a lot of Nixie tube of Hitachi in hand, but I used the (NEC) LD-955A used this time. Driving circuit in the static display using the 74141, the control uses the PIC16F877 you are taught in school, I tried formed a soft CCS-C. Since using XTCO the main clock, it does not slip off one second even after one month.
PIC16F877 CCS C Nixie Clock Project