
Hello, friends. I have designed at the request of a teacher stepper motor driver circuit I want to share with you. System is going to start actually quite a few. But barely was able to finish due to the intensity of work.
I made the drive has been designed as general. So it does not serve any particular purpose. In short, was to observe the operation of stepper motors can say. I have done with the drive stepper motor with a step angle of 1.8 or 7.5 can be used. Engine Full and Half-driving mode can take. In addition to the previously set speed can remove one touch. Or the engine can move step by step.
As the title suggests, L297 and L298 at the binary driver I used. Through integrating these two stepper motors can do many operations on /
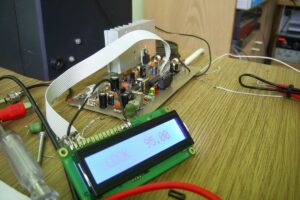
As usual as the main control PIC16F628 and LCD 2X8 in the process I use to view. L297 clock frequency of PIC16F628 ‘s RB3 pin PWM hardware module that promise. Also L297’N Enable, CW-CCW and HALF / FULL pinlerini I’m checking with the 16F628. I like the hardware in general.






In the video the engine has an engine 6-ended unipolar. But after applying power to the common end of the engine at low revs me for taking too much current as bipolar çalıştırdıdm engine. So the drive end only depend on the phase of the motor.
L297 L298 Stepper Motor Driver with PIC16F628A files:
FILE DOWNLOAD LINK LIST (in TXT format): LINKS-19930.zip

Sprint Layout Makros
PCB drawing for the sprint layout pcb program I’m using a call to a custom macro got was as usual first on google search I thought I’d still exaggerated, I guess 🙂 a very macro found already at the official site new macros published, though most of my unnecessary so I scavenged I extract the archive into
Macro according to me this time was more orderly archive folder distinguish varieties integrating macros, macros, etc. transistor. There are a lot of new macro. Prepare the future under this article, I’ll also add that I found useful macros
Schrittmotortreiber Schaltkreis mit PIC16F628A L297 L298
Hallo Freunde. Ich habe auf Wunsch eines Lehrers Schrittmotortreiberschaltung entworfen, die ich mit dir teilen möchte. Das System wird tatsächlich einige starten. Aber konnte aufgrund der Intensität der Arbeit kaum fertig werden.
Ich habe die Fahrt als allgemein gestaltet. Es dient also keinem bestimmten Zweck. Kurz gesagt, konnte man den Betrieb von Schrittmotoren beobachten. Ich habe mit dem Antrieb Schrittmotor mit einem Schrittwinkel von 1,8 oder 7,5 verwendet werden können. Motor Voll- und Halbfahrmodus kann dauern. Zusätzlich zu der zuvor eingestellten Geschwindigkeit kann eine Berührung entfernt werden. Oder der Motor kann sich Schritt für Schritt bewegen.
Wie der Titel andeutet, haben L297 und L298 den binären Treiber benutzt. Durch die Integration dieser beiden Schrittmotoren können viele Operationen auf /
Wie üblich als Hauptsteuerung PIC16F628 und LCD 2X8 im Prozess benutze ich zu sehen. L297 Taktfrequenz von PIC16F628 RB3 Pin PWM-Hardwaremodul, die versprechen. Auch L297’N Enable, CW-CCW und HALF / FULL Pinlerini überprüfe ich mit dem 16F628. Ich mag die Hardware im Allgemeinen.