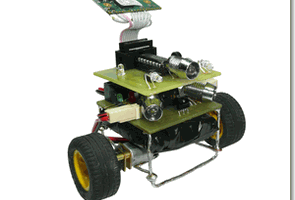
Bu tasarım, hâlihazırda yayınlanmış olan Robot 1.1 tasarımının devamı niteliğindedir. Yeni tasarımın amacı, genel olarak daha küçük boyutlar, bileşenlerin daha kolay kullanılabilirliği ve robotun uzaktan kumandası için Spezial Electronic’in connectBlue Bluetooth modülünü kullanma olasılığıydı. Robot bu nedenle otonom olarak engellerden kaçınabilir veya Bluetooth üzerinden kablosuz olarak kontrol edilebilir.
Elektronik kısım, bir ana ve bir ikincil karta bölünmüştür. Ana kart motor çalıştırma ve engel algılama sağlar. Yan panel esas olarak Bluetooth modülünü bağlamak için kullanılır ve robot onsuz tamamen işlevseldir, ancak kablosuz olarak kontrol edilemez. Mevcut en fazla parçanın kullanılması sayesinde mekanik yapı çok basittir. Robotun gövdesi bakır tellerden yapılmıştır, güç kaynağı olarak dört AAA Ni-MH hücresi kullanılır ve tekerlekler doğrudan motosikletin bir parçası olan şanzıman miline takılır. Visual Studio’da programlanan kontrol programları, hem Windows işletim sistemi hem de Windows Mobile için robotun Bluetooth üzerinden kablosuz kontrolü için kullanılır.
Akümülatörden gelen voltaj X1 terminal bloğuna bağlanır ve LED5 varlığını gösterir. Stabilizasyonun ve besleme voltajında muhtemelen daha fazla ayarlamanın yalnızca daha büyük bir PCB’nin üretilmesini gerektireceği ve pil voltajının yaklaşık 4,5V ila 5,5V arasında değişeceği göz önüne alındığında, besleme voltajında daha fazla ayarlama yapılmadı ve sadece bir kapasitör S1 anahtarı bağlandı C1. Diyagramdan da görülebileceği gibi, LED5 besleme voltajının varlığını gösterir. Ayrıca mikrodenetleyici IC1 için yaklaşık 3.6V’luk bir besleme gerilimi elde etmek gerekliydi. Gerekli voltaj, 1,4 V azalan, yani 5 V’tan gerekli 3,6 V’a düşen 1N4148 diyotları (D1 ve D2) seri bağlayarak elde edildi. Motorlardan gelen parazit nedeniyle, alıcının ve ana işlemcinin güç yoluna, istenmeyen girişimi yeterince ortadan kaldıran L1 ve L2 bobinlerinin dahil edilmesi gerekiyordu.
Ana kartın ve dolayısıyla tüm robotun en önemli bileşeni, PDIP16 paketindeki (IC1) Freescale MC9S08QG8 mikrodenetleyicidir. Örneğin, programa yönelik 8 bin bayt flash belleğe, 512 bayt RAM’e, bir adet 16 bitlik zamanlayıcıya, bir adet 8 bitlik zamanlayıcıya ve bir UART, SPI ve I2C iletişim arabirimine sahiptir. C dilinden makine koduna çevrilen programlar için optimize edilmiş HCS08 çekirdeği, harici bir kaynaktan 20 MHz’lik bir frekansa kadar saat hızına sahip olabilir. Ancak PidiBot, 8.3712 MHz olan ayarlanabilir dahili saat kaynağının maksimum frekansını kullanır. Buradan indirilebilen BDM arayüzünü kullanarak mikrodenetleyicinin Flash belleğine bir program yüklemek gerekir. Bu program, bir SO8 paketine entegre edilmiş bir çift MOSFET transistör IRF7303 (T1) kullanarak motorun çalıştırılmasını sağlar. Transistörler, kullanılan motorlar göz önüne alındığında fazlasıyla yeterli olan 3,5 A’ya kadar bir akımı anahtarlama yeteneğine sahiptir.
Engel tespiti için bir SFH5110-36 IR darbe alıcısı ve demodülatörü (IC2) kullanıldı. İkincisi, mikro denetleyiciye direnç R8 üzerinden bağlanır, çünkü çıkış sinyallerinin voltajı mikro denetleyicinin besleme voltajından daha yüksektir ve bu nedenle zarar görebilir. Alıcının kendisi engelden yansıyan ışınları yakalamaya çalışır ve bunlar hakkında mikrodenetleyiciye bilgi verir. Işınlar dönüşümlü olarak bir çift IR LED (LED1 ve LED2) tarafından yayılır. Kızılötesi LED’lerin darbe yayacağı yoğunluk, R1 ve R3 düzelticiler kullanılarak ayarlanır. Bir engel algılanırsa, LED3 veya LED4 yanacaktır. Son olarak, BDM arayüzü için mikrodenetleyici programını programlamaya ve hata ayıklamaya yarayan ana kart üzerine bir konektör yerleştirmek gerekliydi.
İkincil kartın en önemli parçası yine ana kart mikrodenetleyicisi ile aynı programı içeren PDIP16 paketindeki (IC1) Freescale MC9S08QG8 mikrodenetleyicisidir. Kısa girişte daha önce bahsedildiği gibi, yan kart esas olarak Bluetooth modülünü SV1 konektörü aracılığıyla mikrodenetleyiciye bağlamak için kullanılır. En ucuz varyant, OEMSPA310 olan PidiBot için kullanıldı. Düz bir 9 çekirdekli kabloyu (veya bağlantıda Sıfırlama pimi kullanılmadığından 8 çekirdekli) Bluetooth modülünün kendisine lehimlemek ve onu kendinden kesen bir konektörle donatmak gerekir. Uçlar, modül üreticisinin veri sayfasında J6 olarak bahsettiği konektöre lehimlenmiştir.
Modül ile iletişim için en önemli kablolar, veri aktarımı için kullanılan RxD ve TxD’dir. Yeşil LED/Anahtar 1 terminali, yalnızca Bluetooth modülünün çeşitli parametrelerini ayarlamanın mümkün olduğu AT modunun işlevselliğini test etmek için mikrodenetleyiciye bağlandı. Veri sayfasına göre Reset pinini bağlamak gerekli değildir. Bluetooth modülünün fabrika ayarlı olması ve böylece veri akışının donanım tarafından kontrol edilmesi (CTS ve RTS kullanılarak) nedeniyle CTS giriş piminin bağlanması da gerekliydi. Bluetooth modülünün AT modunda veri akışının donanım kontrolünü kapatmak mümkündür, ancak canlanma açısından CTS’yi topraklamak daha kolaydı, böylece modül sürekli olarak mikrodenetleyiciye veri gönderir.
Mikrodenetleyici IC1’in bir pimi, engel algılama kabiliyetini biraz iyileştiren başka bir IR LED (LED2) için kullanıldı. Beyaz LED’ler (LED1 ve LED4) için başka bir terminal kullanıldı. Beyaz LED’e akım sağlayan transistör T1’i anahtarlamak için kullanılan çıkış, LED’i manuel olarak açmak için kullanılan S1 düğmesi tarafından da paylaşılır. Beyaz LED’lerin bir düğme ile açılması, mikrodenetleyicinin LED’i her 100 ms’de bir algılanamayan bir an için kapatacağı, pimin girişe olan algısını değiştireceği, girişte yükselen bir kenar olup olmadığını test edeceği şekilde yapılır. düğmesine basıldı) ve LED’lerin önceki durumuna bağlı olarak kapatılır veya açılır.
Mikrodenetleyicinin ana görevi engelleri aramak ve onlardan kaçınmaktır. Algoritma çok basittir ve SFH5110 alıcısının, bizim durumumuzda 1:1 değişime sahip 36 kHz frekanslı bir darbe yakalarken çıkışını günlüğe kaydetmesi gerçeğini kullanır. 1. Ve böylece mikrodenetleyici, ilk zamanlayıcıyı kullanarak sol IR LED’e 8 ms darbe gönderir, 8 ms boyunca hiçbir şey gönderilmez, 8 ms sağ IR LED’e darbe gönderir, 8 ms boyunca hiçbir şey gönderilmez, yan karttaki IR LED 8ms boyunca yanar ve son olarak 8ms boyunca hiçbir şey gönderilmez. Bu sayede mikrodenetleyici sürekli darbeler gönderirken ana programın döngüsünde SFH5110 sensörünün durumunu kontrol eder. Alıcı sinyali yakalanırsa, karşılık gelen gösterge LED’i yanar (yan paneldeki IR LED’inden alınan sinyalin sinyali verilmez).
İkinci zamanlayıcı, sensörlerden elde edilen verileri değerlendirmek için kullanılır ve buna göre ilgili motoru bir engele çarpmaması için tam anında kapatır. Ne yazık ki, boyut ve basitlik gereklilikleri nedeniyle, PCB üzerine motorun dönüş yönünü değiştirebilecek bir H-köprüsü takmak mümkün değildi ve bu nedenle robot geri dönemez. Bu, yan panoya başka bir IR LED ekleyerek algılama kabiliyetini iyileştirerek biraz dengelendi.
Programın diğer bir kısmı, Bluetooth modülü ile iletişimi sağlar. Mikrodenetleyici aldığı karaktere göre motorları ve reflektörleri açar veya kapatır. Herhangi bir değişiklik olursa (motorun çalıştırılması, bir engelin algılanması) mikrodenetleyici bir sinyal gönderir, böylece robotta neler olup bittiğini uzaktan kontrol etmek mümkün olur. Robotla iletişim kurarken kullanılan karakterlerin listesi, Windows için kontrol programının ekli kaynak kodundan görülebilir.
Kablosuz kontrol programı:
PC sürücüsü yalnızca Windows XP altında test edilmiştir, ancak en son Windows Vista’da da çalışması gerekir. Kullanıcı arayüzü çok basittir. Bluetooth modülünü bilgisayarla eşleştirdikten sonra oluşturulan seri COM bağlantı noktasını seçmek için bir kutu, bağlanmak veya bağlantıyı kesmek için bir düğme, Manuel veya Otonom modunu seçmek için bir düğme ve robotu kontrol etmek için düğmeler içerir. Ancak robot klavye kullanılarak da kontrol edilebiliyor. Robotu kontrol etmek için I, J, K ve L tuşlarını kullanın ve beyaz LED’i açmak veya kapatmak için A tuşunu kullanın. Motor ve sensörlerin durumları LED’ler ile gösterilir.
Kontrol programı da Windows Mobile işletim sistemi için yazılmıştır. Ancak bu sürümde düğme yoktur, bu nedenle robotun klavyedeki düğmeler kullanılarak kontrol edilmesi gerekir. *, #, 0 ve 8 düğmeleri robotu kontrol eder, 1 düğmesi beyaz LED’leri kapatır ve 2 düğmesi onları tekrar açar. Program, Bluetooth modülüne sahip çoğu cihazla ve en az Windows Mobile işletim sistemi sürüm 2 ile çalışmalıdır.



Kaynak: mica.ic.cz/clanek.php?kat=1&clanek=1 (kapalı)



Maliyeti ne kadar hocam bunun
Mearaba arkadaslar. Marmara üniversitaside okuyorum. Ben bu projeyi bitirme projesi olarak yapacağım. Bazı sorularım var. Sizinle görüşmem lazım. Benim mail adresim [email protected] . İlgilenirseniz sevinirim. Şimdiden ilginiz için teşekkür ederim. LÜTFEN!!!
bende bu projeyi yapmak istiyrum ama hakan arkadaşımız gibi benimde aklımda takılan bir kaç soru var. bu yuzden benimlede kontak kurmanızı isterim mail adresim [email protected]. sizin mail adresinizi bulsam oraya mail atacaktım ama onuda bulamadım. şimdiden ilginiz için çok teşekkürler.
Sorularınızı burada belirtebilirsiniz bilgisi olan kişiler cevap verebilir hem sorularınıza gelecek olan cevaplardan diğer okurlarımızda faydalanmış olur
Hocam dokumanı türkçeye çevirirseniz bir nebzede olsa soruları giderebilirsiniz ayrıca bu araç nasıl yapılmış kullanılan malzemeler neler telefonun modeli önemli kontrol için telefonu her hangi bir yazılım yükenıyormu?
bluetooth modülünü nerden temin edebiliriz modül bulunduktan sonra gerisi kolay
Bu projede Lap Top Bluetooth modülünü söküp kullanacağım merak ettiğim konu nasıl tanıtıcağım birbirlerine..
Yani Windows işletim sistemli telefon ile Bluetooth modülü nasıl birbirine tanıtıcağım ?
bu devreyi tamamlayan varmı? pic kodlarını bulamadım yardımcı olurmusunuz
Çok güzel ve basitleştirilmiş konular. Emeği geçen herkese teşekkürler.
hocam dökümanı inceledim bluetooth değil kızılötesi ile iletşim kuruyor
cep bilgisayarı ile kontrol edilebiliniyor
Bluegiga firmasının WT11 modülünü kullanmış olan arkadaşlar var mı acaba? Gömülü sistem projesinde kullanıyorum.
Merhaba arkadaşlar ben bluetooth ile bir proje yapmak istiyorum bitirme projesi olucak. Ne önerirsiniz ve burada bahsi geçen projeyi bitiren var mı?
Projelerden geçimini sağlayan biri olarak destek verebilirim,[email protected]
malzeme listesi elinde olan varsa buraya paylaşa bilirrmi acaba