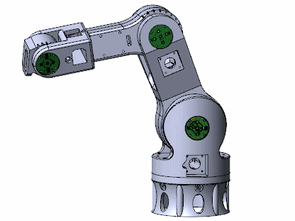
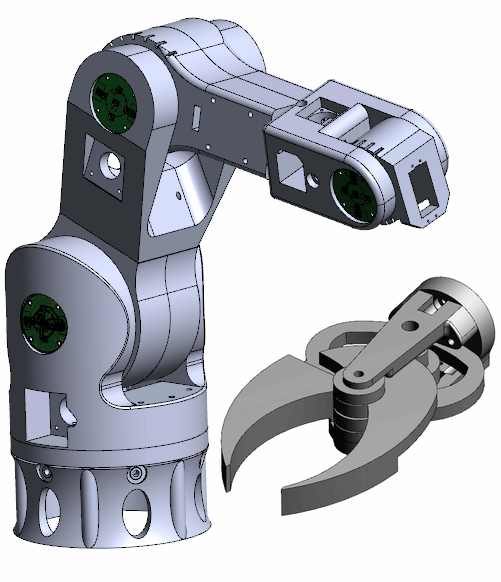
This study deals with the problems, structures, controls of industrial robotic arms and their role in Industry 4.0. The study describes the development and realization process of an industrial robotic arm model with 3D printing. Besides building the model, the job deals with firmware, software and inversion kinematics which are crucial for control.
Detailed and source codes c++ arduino etc. All files with 3d drawings are there. Even if you do not implement the industrial robot arm project, it can give inspiration for different studies.
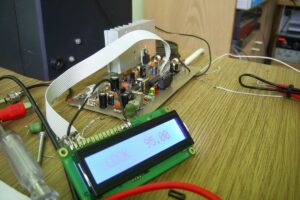
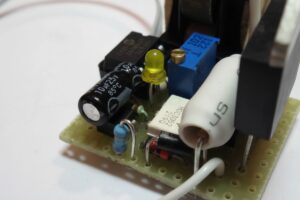
Robot Arm Hardware – Control: Control hardware consists of several parts. The power supply part is common for the control and movement of the robot arm. Arduino Mega 2560 is used for control.
The Arduino Mega 2560 board can use 54 digital inputs/outputs, 15 of which enable PWM mode. It is also possible to use 16 analog inputs. Each one
digital pin can supply 20 mA DC and in case of pin it is 3.3 V. up to 50 mA. Clock signal for MCU provides 16MHz crystal signal directly on board
oscillator. A4988, A4983 DRV8825 are used for stepper motor controllers.
Robot Arm PC interface: Robot Control computer user interface implementation was implemented in MS Visual Studio 2010 development interface. in C++ programming language
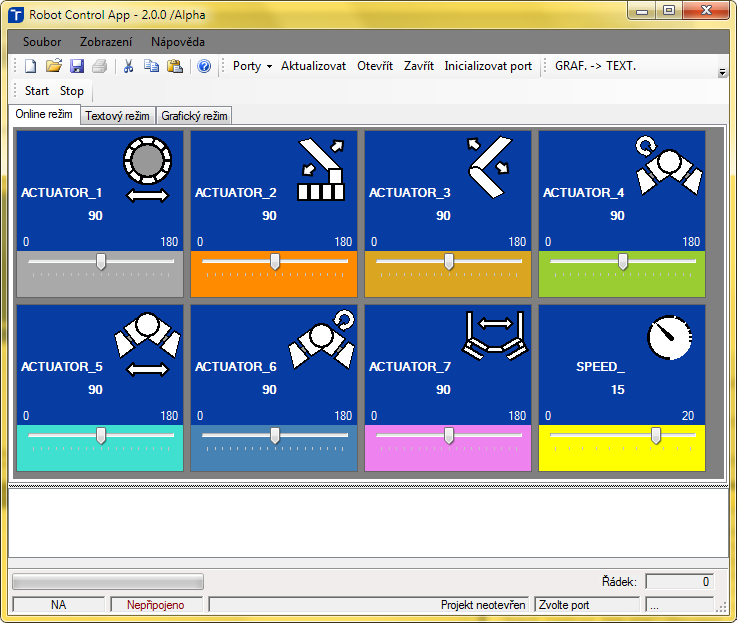
NET4 Framework. In terms of functionality, the application has several parts:
• Communication with the control board via USB (virtual serial),
• online robotic arm control or control configuration,
• conversion between different arm position formats,
• programming of robot movement with the possibility to save the code.
These functional parts are partially distinguishable even in the graphical form of the program. Toolbars basically contain tools for connecting and communicating with the clipboard.
management. When moving between individual panels, the online mode switches between arm control and motion programming for automatic robot operation.
In addition to the .exe executable, the application also uses the AppData directory and files. is located in. These are basically some images of the graphical interface.

![]()
FILE DOWNLOAD LINK LIST (in TXT format or file): 27863a.zip pass: 320volt.com