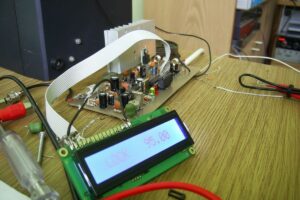
Ultrasonik mesafe ölçüm, bulma devresinde pic16f876 mikrodenetleyici ve ad605 (Dual Low Noise SingleSupply Variable Gain Amplifier) entegreleri kullanılmış C ve asm yazılımları var devre şeması ayrıca osiloskop ölçüm resimleride bulunuyor. Ultra sonik sensör olarak 40khz Transdüserler kullanılmış.
Birçok gömülü sistem tasarımında, fiziksel temas olmadan sınırların veya nesnelerin mesafesini ayırt etme yeteneğine sahip olmak gerekli hale gelir. Ultrason, bu görevin önemli bir doğrulukla gerçekleştirilebileceği çok yararlı bir araç olabilir.
Ultrasonik Mesafe bulucu aşağıdaki birincil bileşenleri kullanır.
1. Microchip PIC16F876 mikro denetleyici
2. Bir Analog Cihaz AD605 Tek Kaynaklı Değişken Kazanç Amplifikatörü
3. 40KHz Ultrasonik Dönüştürücüler (Gönder ve Al)
4. “Dönüştürücü Uyumlu” ferrit çekirdekli toroidal Transformatör

Ultrasonik Mesafe Bulucu Çalışması
Ultrasonik Mesafe Bulucu, I2C arabirimi aracılığıyla iletişim yoluyla bir aralık örneği döndürmek için tetiklenir. PIC adresini (programlanabilir) aldıktan sonra, alınan bir onaltılık 0x0d veya Satır Başı baytı, modülün bir aralık örneği almasına neden olur. Tetiklemeden sonra, PIC’nin oda sıcaklığında her 2 inçlik ses yolculuğu için dönüş sinyali gücünü kaydetmesine izin vermek için kısa bir süre geciktirilmelidir.
PIC işlemcisi tetiklendiğinde, FDV303NCT N-Kanal Mantık seviyesi MOSFET’e yaklaşık %50 görev döngüsüne sahip 16 darbe üretmek için Yakala/Karşılaştır modülünün PWM özelliğini kullanır. Mikro denetleyici daha sonra Ultrasonik Alıcının İletilen darbeden yerleşmesine izin vermek için 1 ms gecikmeye ayarlanır.
FDV303NCT, bir transformatörün birincil bobinini çalıştırır. Transformatörün ikincil bobini, Ultrasonik Dönüştürücünün 40KHz’deki empedansına uyacak şekilde sarılır ve Dönüştürücünün rezonans çalışma frekansında maksimum enerji aktarım verimliliği sağlar (aşağıdaki notlara ve hesaplamalara bakın). Amidon’dan bir ferrit çekirdekli toroid ve 30 AWG politermal tel kullanıldı. Transformatör şeffaf Epoksi ile kaplanmıştır. Birincil transformatörün sadece 2 dönüşü vardır ve düşük dirençli güç kaynağından izole edilmelidir. 2 ila 10 ohm arasında her şey iyi çalıştı, 4.32 ohm’luk bir direnç seçildi. Birincil bobin boyunca ortak/toprağa bir 4.7 uF kondansatör yerleştirildi. %50 veya daha az görev döngüsünde, kapasitörün darbeler arasında yeniden şarj olması ve bobinin primerini tam kapasitede çalıştırmak için gereken enerjiyi sağlaması için bolca zaman vardır.

1 ms’lik sönümleme süresi tamamlandıktan sonra, işlemci, sesin oda sıcaklığında 255 kez 2 inç yol alması (bir inç hareket, bir nesneden yansıma, bir inç geri hareket) için geçen süreye eşit olan bir kesintiye dayalı zaman gecikmesi başlatır. ve inç için bir kayıt artırın. Alıcı Dönüştürücü çıkışı, maksimum ayarlanabilir kazanç (0dB-96.8dB) için kablolu bir AD605 Amplifikatöre bağlanır. Amplifikatörün çıkışı bir voltaj çiftleyici devreden alınır ve PIC16F876’nın A2D dönüştürücüsüne girmeden önce doğrultulur. Geri dönen her darbenin, gürültüyü ortadan kaldırmaya yardımcı olmak için önceki dönen darbeyle ortalaması alınır ve inç kayıt değerine karşılık gelen en büyük darbeler, en büyük nesne mesafesi olarak kaydedilir.
255 iade edilen numune karşılaştırıldıktan sonra, inç değeri onaltılıdan BCD’ye dönüştürülür ve PIC16F876’nın I2C Portundan okunmaya hazır hale gelir.
NOTLAR VE HESAPLAMALAR
Fo = 1/(2π√LC)
Dönüştürücünün kapasitansı tipik olarak 2,4 nF (veya ölçülen 2,54 nF) ve rezonans frekansı (Fo) 40KHz ise, dönüştürücünün kapasitif reaktansı 1566ohm olacaktır. Transformatörün sekonder sargısının değeri, 1566ohm’luk aynı endüktif reaktans değerine sahip olacak şekilde hesaplanmıştır. L daha sonra XL = 2 πFoL endüktif reaktans formülünden hesaplanır, burada XL ve Fo bilinen değerlerdir. L = 1566ohm/(2π40KHz) 6.23mH verir. Transformatörün birincil bobini, transformatör dönüş oranından dolayı maksimum voltaj kazancı sağlamak için yalnızca 1 veya 2 dönüşe sahip olmalıdır.
T1 Özellikleri
Amidon Ferrit Toroid
FT-50-J Manganez-Çinko
# Dönüş – 1000√(6,23mH/AL)
AL = FT-50-J spesifikasyonuna göre 2710mH/1000 dönüş
# Dönüş = 47,97, kullanılan gerçek dönüş sayısı 50 olup en yakın mH değeri olan 6,25 mH’dir. Transformatörü sarmak için 30AWG polythermaleze tel kullanıldı.
Alınan I2C 0x0d baytından tetiklenen Sonar, SDA (I2C veri hattı) ve SCL’de (O2C saat hattı) gösterilir. Kanal 2, FDV303 MOSFET’in kapısında iletilen 40KHz’de 16 darbeyi gösterir. Kanal 1, PIC’in analogdan dijitale dönüştürücünün girişindeki doğrultulmuş amplifikatör çıkışını gösterir. Yaklaşık 15ms sonra sonuç I2C portu üzerinden tekrar okunur.

I2C Sonar Range Finder
The Ultrasonic Range Finder is triggered to return a range sample by communication via I2C interface. After receiving the PIC’s address (which is programmable), a hexadecimal 0x0d, or Carriage Return byte received will cause the module to take a range sample. After triggering a short time period should be delayed to allow the PIC to record the return signal strength for every 2 inches sound travels at room temperature.
When triggered, the PIC processor uses the PWM capability of the Capture/Compare module to generate 16 pulses of approximately 50% duty cycle to an FDV303NCT N-Channel Logic level MOSFET. The micro-controller is then set up to delay 1ms to allow the Ultrasonic Receiver to settle from the Transmitted pulse.
After the damping time of 1ms is finished, the processor starts an interrupt driven time delay that is equal to the time it takes sound to travel 2 inches (travel an inch, reflect off an object, travel back an inch) at room temperature 255 times and increment a register for inches. The Receiver Transducers output is connected to an AD605 Amplifier wired for maximum adjustable gain (0dB-96.8dB). The amplifiers output is taken through a voltage doubler circuit and rectified before entering the PIC16F876’s A2D converter. Each returned pulse is averaged with the previous returned pulse to help cancel out noise and the largest pulses corresponding inches register value is recorded as the largest objects distance.
NOTES AND CALCULATIONS
Fο = 1/(2π√LC)
If the capacitance of the transducer is typically 2.4nF (or measured 2.54nF) and the resonant frequency (Fo) is 40KHz, the transducer will have a capacitive-reactance of 1566ohms. The value of the transformers secondary winding was calculated to have the same inductive reactance value of 1566ohms. L is then calculated from the inductive reactance formula XL = 2 πFoL where XL and Fo are the known values. L = 1566ohms/(2π40KHz) to give 6.23mH. The transformer’s primary coil should have only 1 or 2 turns to yield the maximum voltage gain due to the transformer turns ratio.
T1 Characteristics
- Amidon Ferrite Toroid
- FT-50-J Manganese-Zinc
- # Turns – 1000√(6.23mH/AL)
- AL = 2710mH/1000 turns from the FT-50-J’s specification
- # Turns = 47.97, actual # of turns used was 50 to give the closest mH value of
- 6.25mH. 30AWG polythermaleze wire was used to wind the transformer.
Joseph E. Bradshaw 5-24-2004
Kaynak: http://joescircuits.com/es308_i2c/SONAR%20PIC%20I2C/