
Sumo, Çizgi izleyen ve robot kontrol kartı projeleri açık kaynak ve tasarımları çok kaliteli tüm kaynaklar verilmiş PIC mikrodenetleyici kodları ve eagle şema pcb çizimleri bulunuyor özellikle çizgi izleyen robot için hazırlanan PCB çizimi çok iyi yüksek güçlü bir sistem ile çok hızlı gidebilir 🙂
Robot kontrol kartı daha önce paylaşılan “ROTKON ” tarzında hazır donanım (bakınız: Robot Projeleriniz için ROTKON Robot geliştirme kontrol kartı) PICAXE28X2 VE PIC18F25K22, PIC18F26K22 mikrodenetleyiciler ile kullanmak için 2 farklı pcb var..
Sumo robot yazılımı MPLAB C18 ile hazırlanmış PIC18F4550 mikrodenetleyici üzerine kurulu ek olarak robot gövde tasarım çizimleride (dfx) var.
Ottawa’daki çizgi izleyen robotların sayısını başlatmak amacıyla, oldukça yetenekli küçük bir hızlı çizgi izleyen tasarım üstlenildi. Amaç, yazılım kitaplıklarıyla eksiksiz bir donanım tasarımı sağlamaktır.
Geliştirme aşamasındaki dört varyant: biri PIC18F25K22 tabanlı (C, JAL veya temel olarak programlanabilir) LineORE MK2A olarak adlandırılır, biri PICAXE 28X2 tabanlı LineORE MK2P olarak adlandırılır, biri PIC18F4550 tabanlı (yeni başlayanlar için önerilmez) LineORE olarak adlandırılır MK1 ve ATmega328 tabanlı bir Arduino uyumlu (teslimat bekleyen PCB’ler). LineORE MK2A ve LineORE MK2P versiyonlarına odaklanılıyor ve donanım tasarımı üretimden geldiğinde AVR versiyonunu takip edecek.
Bu robot, 14 Mayıs 2011’de düzenlenen CNRG Ottawa Regional oyunlarında hat takip etme ve labirent çözme etkinliklerinde yarışmak üzere tasarlanmıştır. Bu etkinliklerin kuralları burada bulunabilir: Çizgi İzleyen Kurallar, Çizgi İzleyen Yarış Kuralları ve Çizgi Labirent Kuralları
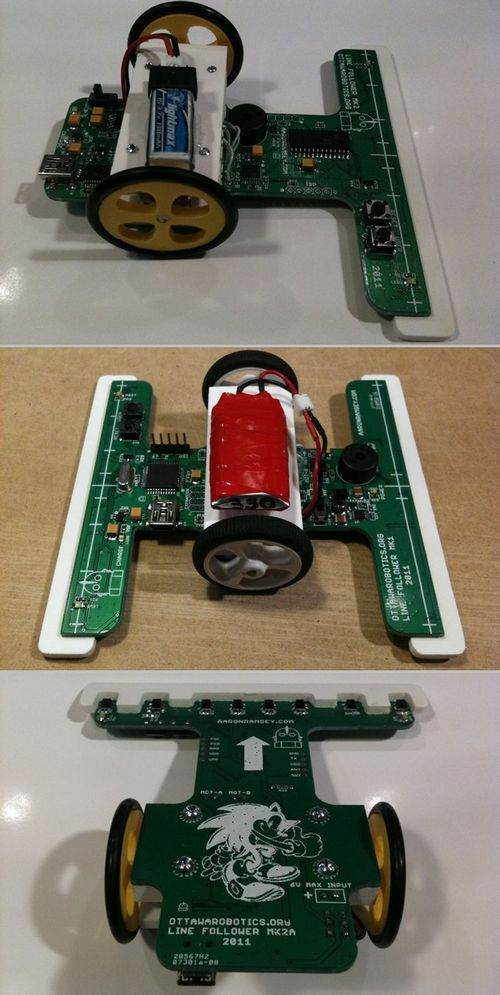
LineORE MK2A : PIC18F25K22 Varyantı
Microchip C18, JAL ve ücretsiz Amicus18 temel derleyici ile desteklenen Microchip PIC18F25K22’yi kullanır
Önde yan yana 98,6 mm’yi kapsayan 8 hat sensörü
Çift 1A h köprüsü
iletişim ve 1S LiPo pil şarjı için yerleşik USB bağlantı noktası
2 kullanıcı LED’i, bir hoparlör ve kullanıcı tarafından programlanabilir bir düğme
IR LED güç kontrolü
RF hata ayıklama bağlantısı için tasarlanmış, tek dijital G/Ç’ye sahip bir genişletme başlığı
1 dijital G/Ç ve 1 analog/dijital G/Ç içeren ikinci bir genişleme başlığı
10cm x 10cm ebadında, hız hattı algılaması için robotun önünden geriye doğru 2/3 oranında tekerlekler monte edilmiştir
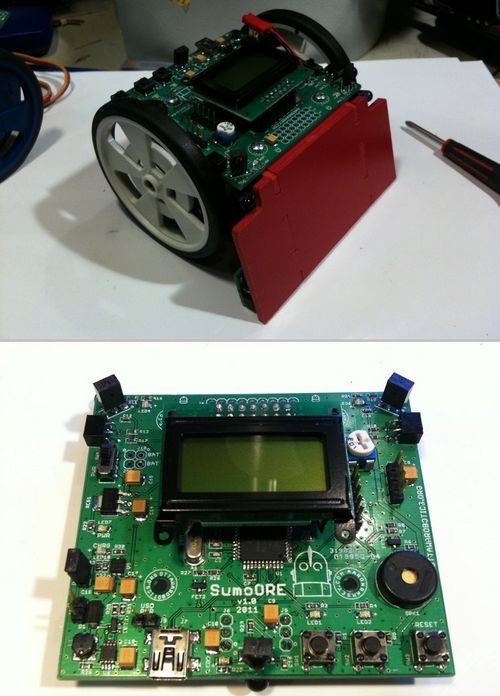
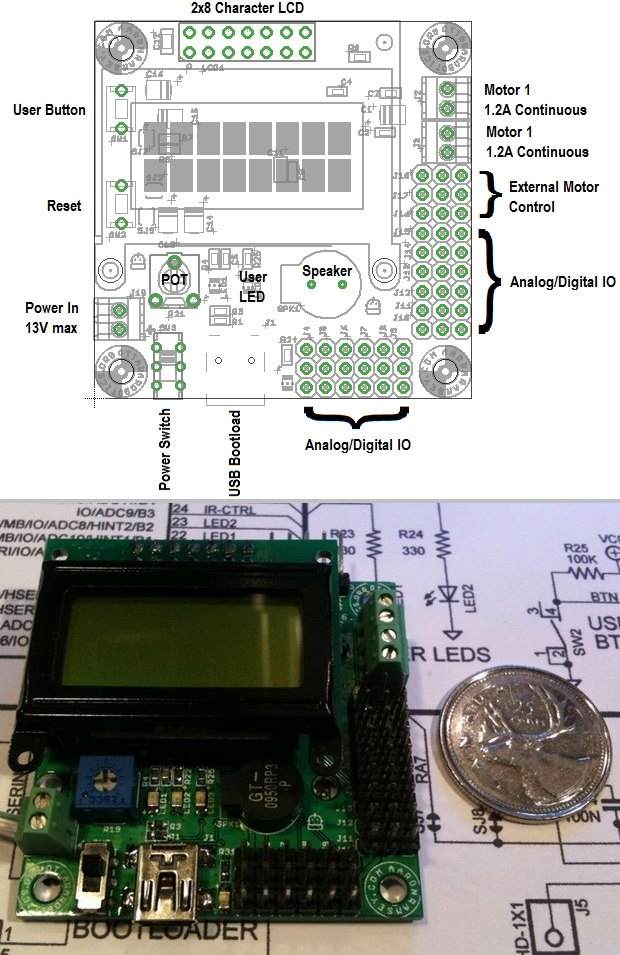
MiniORE3 Robot Kontrol Cihazı
Entegre LCD, H-Bridge, Hoparlör, USB önyükleyici ve hem analog hem de dijital IO’ya sahip küçük bir genel amaçlı robot denetleyici Biri PICAXE28X2 ve diğeri PIC18F25K22/18F26K22 tabanlı olmak üzere iki varyant geliştirilmektedir. Doldurulmuş panolar Ocak ayı sonlarında kullanıma sunulacak
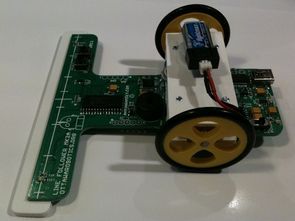
SumoORE Robot Kontrol Cihazı
3 adede kadar IR menzil sensörü, yüksek akımlı çift servo sürücü, 7 adede kadar zemin sensörü, isteğe bağlı tekerlek kodlayıcılar, entegre LCD, Hoparlör, LiFEPO4 şarj cihazı, USB önyükleyici ve genel amaçlı hem analog hem de dijital IO içeren küçük bir genel amaçlı robot kontrol cihazı amaçlı kullanım
2 adet şarj edilebilir A123 18650 LiFEPO4 pil kullanır
Sintra’dan yapılmış şasi. Kullanıcının robotu 500 gram sınırına getirmek için yalnızca ön bıçak eklemesi ve ağırlık eklemesi gerekir
Çizgi izleyen robot daha kapsamlı 3 farklı mikrodenetleyici için PCB tasarımı var. PIC18F25K22 mikrodenetleyici üzerinde kurulu olan projede yazılım MPLAB C18 ile hazırlanmış kaynak kod ve kütüphane dosyaları varayrıca PIC18F4550, PICAXE28X2 ve AtMega328 için eagle ile hazırlanan PCB, şema çizimleride verilmiş
Son olarak Robot kontrol kartı resimleri
Projeler birebir uygulanmasa da buna imkan olmasa da devreler, kaynak kodlar , kütüphane dosyaları, eagle pcb, şema çizimleri işe yarayabilir
Kaynak: wiki.ottawarobotics.org
Şifre-Pass: 320volt.com
Yayım tarihi: 2013/08/08 Etiketler: çizgi izleyen robot, line follower robot, microchip pic projeleri, PIC18F25K22, robot controller board, robot projeleri, sumo robot