Çok Bölgeli IR Mesafe Sensörü CD4011 TSOP1838
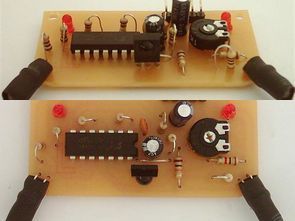
Çok Bölgeli IR Mesafe Sensör devresi cd4011 (2 girişli 4x NAND ) entegresi üzerine kurulu devre üzerindeki 1k trimpot ile hassasiyet ayarlanabilir. Çeşitli robot, alarm projeleri ya da farklı uygulamalarda kullanılabilecek basit kullanışlı bir devre ayrıca proteus şeması ve ares baskı devreside bulunuyor. Yapılan devreye ait resimler; Çok bölgeli IR yakınlık sensörü Bu tür bir…