
DİRENÇ VEYA REAKTANSLA YOL VERME
Motorları düşük gerilimle başlatmada en çok kullanılan yöntem, dirençle veya reaktansla yol vermedir. Dirençle veya reaktansla yol verme birbirine çok benzer ve temel ilke, şebeke geriliminin bir kısmını yol verme direncinde veya reaktöründe düşürmek ve geriye kalanını motora uygulamaktır. Direnç ve reaktansla yol vermede güç devresi aynıdır. Yandaki şekilde güç devresi görülmektedir. Aşağıdaki kısımlarda ise doğru veya alternatif akım motorlarına dirençle veya reaktansla yol vermeye ait çeşitli örnekler incelenecektir:
DİRENÇLE YOL VERME
Statora seri olarak eşdeğer dirençler bağlayarak yapılan yol verme işlemidir. Başlatma butonuna basıldığında stator ve dirençler birbirine seri bağlı olarak kalkınmaya başlar. Belli bir süre sonra (nominal değerinin %60-65’i) dirençler devreden çıkar ve çalışmaya devam edilir. Yol verme uygulanan motorun milinde yük olmamalıdır. Dirençlerin devreden çıkarılmasında zaman röleleri etkin rol oynar.
Yol Verme Direncinin Hesabı : Kalkış esnasında önem kazanan yol verme direncinin değerini bulmak için belli matematiksel hesaplamalar vardır. Bu direncin hesabı şu şekilde gerçekleştirilir.
Ry = Ury / Iy
Um : Motorun bir faz sargı uçlarında kalkış anındaki gerilimdir.
Urm : Motorun iç direnci Rm üzerindeki gerilim.
Uxm : Motorun bobini Xm üzerindeki gerilim
Iy : Yol alma akımı (bizim tarafımızdan belirlenir)
![]()
![]()
Um = Uf . ka (ka: yol alma akımını düşürme katsayısı)
ka = Iry / Idy (Iry : Dirençle yol almadaki akım, Idy : Direkt yol almadaki akım)
Urm = Um . Cos(x) (Cos x, kalkış esnasında çok düşüktür)
Uxm = Um . Sin(x)
Örnek 1 : Etiketinde 380V, 20A yazılı 3 fazlı bir asenkron motor doğrudan yol aldığında nominal akımının 5 katı akım çekmektedir. Bu akım değerini nominal akımın 3 katına düşürecek yol verme direncinin değerini bulunuz. Cos(x)=0,2 ve Sin(x)=0,97 olarak alınacaktır.
Idy = 5 In | Ry = Ury / Iry ise burada Iy = 3 In = 3×20 = 60A yaklaşımı doğru değildir. |
 | If = 20 / Iy = 20×3 / ka = 3 Iy / 5 Iy = 3 / 5 Um = Uf . ka = (3 / 5) . 380 = 228V Urm = Um . Cos(x) = 228 x 0,2 = 45,6V Uxm = 228 x 0,97 = 221,16V |
| Ry = 263,4 / 34,6 = 7,6 ohm |
Örnek 2 : Şekilde tek kademeli dirençle yol verme işlemini gerçekleştiren devre görülmektedir. Burada M kontaktörü, yukarıdaki güç devresinde de görüldüğü gibi dirençli yol vermeyi, A ise tam kalkınmış halde direncin devreden çıktığı hali temsil etmektedir.
Kumanda devresi |
Güç devresi |
Başlatma butonuna basıldığında devre enerjilenecek ve enerji geldikten sonra mühürlemeyi sağlayan M kontağı kapanarak devrenin bu yol üzerinden enerji geçirmesini sağlayacaktır. Eneri, normalde kapalı, gecikmeli açılan zaman rölesi üzerinden devresini tamamlar. Bu esnada alt kısımdaki zaman rölesi de enerjilendiğinden belirli bir süre saymaya başlayacaktır. 5 sn süreyle saydığı varsayılırsa enerjilenmeden 5 sn sonra M kontaktörüne ait kontağı açılıp dirençleri devreden çıkarırken, zaman rölesinin gecikmeli kapanan kontağı da kapanarak A üzerinden motorun tam kalkınmış halde çalışması sağlanır. Devre, durdurma butonuna basılana kadar çalışacaktır.
İlgili animasyon için tıklayınız…
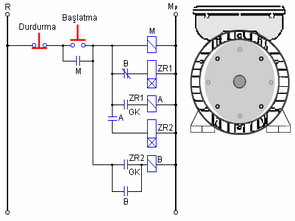
Örnek 3 : Şekilde üç fazlı asenkron motora iki kademe dirençle yol vermeye ait bağlantı şeması verilmiştir. Bu bağlantıda Başlatma butonuna basıldığında, (M) kontaktörü enerjilenir. (M) kontağı kapanır ve Başlatma butonu mühürlenir. Güç devresinde (M) kontakları kapanınca, motor iki kademe direnç üzerinden şebekeye bağlanır. Dirençlerdeki gerilim düşümü nedeniyle, motor düşük gerilimle yol almaya başlar.
Kumanda devresi |
Güç devresi |
İlgili animasyon için tıklayınız…
Başlatma butonuna basıldığında, (M) kontaktörüyle birlikte (ZR1) zaman rölesi de enerjilenir.Bu röle bir süre sonra (ZR1-GK) kontağını kapatır ve (A) kontaktörünü enerjilendirir. Güç devresinde (A) kontakları kapanınca, dirençlerin birinci kademesi devreden çıkar. Motor uçlarındaki gerilim artar. Motor yol almaya devam eder. Kumanda devresinde kapanan (A) kontağı (ZR2) zaman rölesini enerjilendirir. Bu röle bir süre sonra (ZR2-GK) kontağını kapatır ve (B) kontaktörünü enerjilendirir.Güç devresinde (B) kontakları kapanır. Böylece dirençlerin ikinci kademesi de devreden çıkar. (B) kontaktörü enerjilenince, normalde kapalı (B) kontağı açılır. (ZR1) zaman rölesi dolayısıyla (A) kontaktörü ve (ZR2) zaman rölesi devreden çıkar. (ZR2) kontağı açıldığı halde, (B) kontaktörü kendi kontağı üzerinden gelen akımla çalışmaya devem eder.
Şekildeki devrede görevini tamamlayan (A) kontaktörü devreden çıkartıldığından, (B) kontaktörü yol verme dirençlerinin hepsini kısa devre eder. Yol verme dirençleri devreden çıkınca, motor normal şebeke gerilimine bağlanır. Motorun normal gerilimde çalışması, durdurma butonuna basılıncaya kadar devam eder.
REAKTANSLA YOL VERME
Dirençle yol verme yönteminin hemen hemen aynısıdır. Sadece direnç yerine burada reaktans kullanılır. Reaktans, bir nüve üzerine sarılmış sargısı olan, manyetik alanlı dirençlerdir. Devresinin çalışma mantığı aynı dirençle yol vermede olduğu gibi belirli süre reaktans üzerinden motorun aşırı akım çekmesi engellenir ve daha sonra reaktanslar devreden çıkarılır.
Bu yol verme yöntemi büyük güçlü ve yüksek gerilimli motorlarda tercih edilir. Standart reaktans değerleri %50, %65 ve %80 gerilimler uygulanacak şekilde imal edilirler. Büyük güçlerle çalışan motorlarda kaybı önlemek için tercih edilirler. Burada yol verme esnasında kullanılacak reaktans değerinin ölçümü şu şekilde gerçekleştirilir;
Xy = Uxy / Iy
![]()
Um = Uf . ka
Urm = Um . Cos(x)
Uxm = Um . Sin(x)
Örnek 1 : Yukarıdaki örnekte yer alan motora reaktansla yol verme durumunda gerekli reaktans değerini hesaplayınız.
| Iy = 34,6A Uf = 380V Urm = 45,6V Uxm = 221,16V | ||
OTO TRAFOSUYLALA YOL VERME
Motorların düşük gerilimle başlatılmasında gerekli olan düşük gerilim, bir oto transformatöründen de sağlanabilir. Kumanda devrelerinde bir, iki veya daha çok kademeli oto transformatörleri kullanılır. Oto transformatörlerinin sargıları düşük gerilimin alınması için kullanıldığı gibi, yol vermede reaktör gibi de kullanılabilirler. Oto transformatörüyle yapılan yol verme devreleri daha pahalıya mal olduğu halde, daha randımanlı çalışırlar. Oto trafoları primer ve sekonderi aynı sargı olan (tek sargılı) transformatörlerdir. Yandaki şekilde güç devresinin nasıl olduğu görülmektedir.
Burada dikkat edilmesi gereken husus “Yalıtım” trafosuyla, “Yalıtımlı” trafonun farklı şeyler olmasıdır. Yalıtım trafosunda primerin sekondere oranı olan a katsayısı 1’dir. Yalıtımlı trafo ise primer-sekonder arasında fiziksel bağlantı olmayan trafo demektir. Temel prensip motor sargısına uygulanan gerilimin azaltılması yoluyla motorun çektiği yol alma akımının azaltılmasıdır.
 Ih : Hattan çekilen akım
Ih : Hattan çekilen akım
Im : Motorun çektiği akım
Zm : Motorun sargısı
Itip : Tip gücü akımı
Im = Ih + Itip
a = U1 / U2 = Im / Ih
Motor sargısına doğrudan U1 şebeke gerilimi uygulanırsa motor şebekeden, nominal akımın kd katı kadar (Im=In.kd) akım çekecektir. Motor sargısına U2 gerilimi uygulanınca motorun çekeceği akım, gerilimdeki azalma oranında olacaktır ve Im = (U2 / U1).In.kd şeklinde bir hesaplamayla bulunur.
Hattan çekilen akım Ih = Im / a = (1 / a) . (U2 / U1) . In . kd eşitliğinden de şu sonuca varılır;
![]() =
= ![]()
Örnek 1 : Nominal akımı 10A olan bir asenkron motor, şebekeye doğrudan bağlandığında 50A akım çekmektedir. Bu motora %50 ve %65 kademelerindeki oto trafosuyla yol verildiğinde şebekeden çekilecek akımı ve motor akımını bulunuz.
Im = In . kd 50 = 10 . kd kd = 5
%50 için;
Im = (U2 / U1) . In . kd = (50 / 100) . 10. 5 = 25A
![]() = 12,5A
= 12,5A
Itip = Im – Ih = 25 – 12,5 = 12,5A
%65 için;
Im = 0,65 . 10 . 5 = 32,5A
![]() = 21,125A
= 21,125A
Itip = 32,5 – 21,125 = 11,375A
Şekilde, soruda istenen çalışmayı gerçekleştiren devre görülmektedir. Başlatma butonuna basıldığında A kontaktörü enerjilenir ve A kontağı mühürleme yapar. Böylece reaktans üzerinden enerji geçişi başlar. ZR1’in gecikmeli açılan kontağı üzerinden B de enerjilendiği için en fazla %50 kapasiteye ulaşılmasına izin vardır. Bu esnada ZR1 zaman rölesi aktif hale gelir ve saymaya başlar.
Kumanda devresi |
Güç devresi |
İlgili animasyon için tıklayınız…
Belirli bir süre sonra (örneğin 3sn olsun) ZR1’in gecikmeli açılan kontağı açılarak B kontaktörünün enerjisi kesilir, aynı anda ZR1’in gecikmeli kapanan kontağı da kapanarak C’ye ve ZR2’ye enerji gitmesi sağlanır. Böylece %65 kapasiteye ulaşmaya imkan tanınır.
ZR2 rölesi saymayı bitirdiğinde (o da 3sn olsun) ZR2 kontağı kapanarak D kontaktörünü enerjiler ve devrenin en üstündeki D kontağı açılarak A,B ve C üzerine enerji gidişi kesilir. Alt kesimdeki D kontağı kapanır ve devre durdurma butonuyla durdurulana kadar bu kontak üzerinden geçerek çalışmayı tam kapasiteyle sürdürür. Görüldüğü gibi aşama aşama oto trafosu devreden çıkarılır ve tam kapasite çalışmaya doğru geçiş yapılır.
Örnek 2 : Şekilde üç fazlı bir asenkron motora bir kademeli oto tranformatörüyle yol vermede kullanılan bir bağlantı şeması verilmiştir. Böyle bir oto tranformatörüyle motora yol verirken, güç devresinde ilk önce (S) kontakları kapanır. Kapanan (S) kontakları üç fazlı oto transformatörünü yıldız olarak şebekeye bağlar. Transformatörün %65 lik gerilimli orta uçlarına bağlı olan motor, düşük gerilimle yol almaya başlar. Bir süre sonra (S) kontakları açılır ve oto tranformatörü şebekeden ayrılır. Sonra (M) kontakları kapanır. Motor normal şebeke gerilimine bağlanır. Bu devrede ilk önce (S) kontaklarının açılması, sonra (M) kontaklarının kapanması gerekir. Aksi halde oto transformatörünün üst yarı sargıları kısa devre olur.Bu sargılardan geçen yüksek değerli akımlar, transformatörün yanmasına neden olur.
Kumanda devresi |
Güç devresi |
Şekilde verilen devrede başlatma butonuna basıldığında, (ZR) zaman rölesi enerjilenir. Ani çalışan (ZR) kontağı başlatma butonunu mühürler ve sürekli çalışmayı sağlar. (ZR) zaman rölesiyle birlikte (S) kontaktörü de enerjilenir. Güç devresinde (S) kontakları kapanır ve motor düşük gerilimle yol almaya başlar. Bir süre sonra (ZR) zaman rölesinin kapalı kontağı açılır ve açık kontağı kapanır. Böylece (S) kontaktörü devreden çıkar, (M) kontaktörü enerjilenir. Güç devresinde (S) kontakları açılır. Oto transformatörü devreden ayrılır. (M) kontakları kapanır ve motor normal şebeke gerilimine bağlanır.Motorunu normal gerilimde çalışması durdurma butonuna basılıncaya kadar devam eder. (S) ve (M) kontaktörlerinin aynı anda beraberce çalışmaları, bu iki kontaktör arasında yapılan elektriksel kilitleme ile önlenir.
ROTORU SARGILI 3~ ASENKRON MOTORA YOL VERME
Rotoru sargılı asenkron motor, şekilde görüldüğü gibi rotorunda da 3 fazlı sargılar olan ve bu sargıların uçları bilezik ve fırçalar yardımıyla dışarı alınmış motorlardır. Rotora yol verme kısmı olmazsa trafo mantığıyla çalışır ve uçlardan sargı miktarına göre gerilim alınır.
 |  |
Bu tip asenkron motorların yol verme işleminde rotora bağlanan yol verme dirençleri kullanılır. Rotora direnç eklemek suretiyle ilk kalkış anındaki akım azaltılmakta, buna karşılık kalkış momenti (kuvveti) arttırılmış olmaktadır. Piyasada çok fazla kullanılmazlar, çünkü maliyeti yüksektir. Yük altında çalıştırılabilirler.
İlgili animasyon için tıklayınız…
ŞÖNT MOTORLARA YOL VERME
Bir Kademeli Yol Verme : Şekilde bir şönt motora bir kadem dirençle yol vermeye ait bağlantı şeması verilmiştir. Bu devrede motorun maksimum momentle yol almasını sağlamak için, şönt sargı devamlı olarak şebekeye bağlı tutulur. Bu devrenin en büyük özelliği, bağlantıda zaman rölesinin kullanılmamış olmasıdır. Zaman rölesinin görevini bu bağlantıda (A) kontaktörü yapar.
 Kumanda devresi |
Şekildeki devrede başlatma butonuna basıldığüında, (M) kontaktörü enerjilenir. (M) mühürleme kontağı kapanır ve sürekli çalışma sağlanır. Güç devresinde (M) kontağı kapanınca, endüvi yol verme direnci üzerinden şebekeye bağlanır. Yol verme direncindeki gerilim düşümü nedeniyle, motor düşük gerilimle yol almaya başlar. Devir sayısı yükseldikçe, endüvüdeki zıt E.M.K da artar. Yol vermenin uygun bir anında, endüvüdeki zıt E.M.K nedeniyle (A) kontaktörü çalışır. (A) kontağı kapanır ve (RY) yol verme direnci kısa devre olur. Endüvi normal şebeke gerilimine bağlanır. Durdurma butonuna basılıncaya kadar, motor normal şebeke geriliminde çalışır.
Şekilde görülen yol verme devresi, önceki incelenen yol verme devrelerinden oldukça farklı çalışır. Örneğin dirençle yol verme devresinde, yol verme dirençleri belirli zaman aralıklarıyla devreden çıkartılırlar. Dirençlerin devreden çıkma zamanını, zaman röleleri belirler. Şekildeki devrede yol verme direncinin devreden çıkması, motorun devir sayısına bağlıdır. Şebeke geriliminin düşmesi ve motor milindeki yükün artması nedeniyle motorun yol alması gecikirse, yol verme direncinin devreden çıkması da gecikir. Böylece motora daha düzgün bir şekilde yol verilmesi sağlanmış olur.
Üç Kademeli Yol Verme : Şekilde bir şönt motora üç kademe dirençle yol vermeye ait bağlantı şeması verilmiştir. Bu devrede kullanılan (D), (E), (F) röleleri motorun devir sayısına bağlı olarak enerjilenirler. Motorun maksimum momentle yol almasını sağlamak için, şönt sargı şebekeye bağlı tutulur ve (P1) devir ayar reostası normalde kapalı (C) kontağı ile kısa devre edilir. Şönt sargıdan geçen akımın kesilmesinden doğan indüksiyon gerilimi, (VR1) varistörüyle söndürülür. Direnci, uçlarındaki gerilimle ters orantılı olarak değişen elemana varistör adı verilir. Varistörün uçlarındaki gerilim büyüdüğünde, varistörün direnci çok azalır.
 Kumanda devresi |
Şekildeki devrede şönt sargıda doğan indüksiyon geriliminin değeri çok büyük olduğundan, bu gerilime bağlı bulunan varistörün direnci çok küçülür. Doğan indüksiyon gerilimi, varistör üzerinden kısa devre olur dolayısıyla kolayca söner.
Şekilde verilen devrede başlatma butonuna basıldığında (M) kontaktörü enerjilenir. Kapanan (M) mühürleme kontağı devrenin sürekli çalışmasını sağlar. Güç devresinde (M) kontağı kapanınca, endüvi yol verme dirençlerinin üzerinden şebekeye bağlanır. Yol verme dirençlerindeki gerilim düşümleri nedeniyle, motor düşük gerilimde yol almaya başlar. Endüvinin devir sayısı ve endüvide doğan zıt E.M.K gittikçe yükselir. Endüvideki zıt E.M.K şebeke geriliminin %50 değerine ulaştığında , (D) rölesi enerjilenir. (D) kontağı kapanır ve (A) kontaktörü devreye bağlanır. Kapanan (A) kontağı (R1) yol verme direncini kısa devre eder. Endüviden geçen akım ve meydana gelen döndürme momenti artar.
Endüvinin devir sayısı ve endüvide doğan zıt E.M.K yükselir. Endüvide doğan zıt E.M.K şebeke geriliminin %70 ine ulaştığında, (E) rölesi enerjilenir. (E) kontağı kapanır ve (B) kontaktörü devreye bağlanır. Kapanan (B) kontağı (R2) yol verme direncini kısa devre eder. Endüviden geçen akım ve bu akımın yarattığı döndürme momenti artar. Motorun devir sayısı ve endüvide doğan zıt E.M.K yükselir. Endüvide doğan zıt E.M.K şebeke geriliminin %85’ine ulaştığında (F) rölesi enerjilenir.(F) kontağı kapanır ve (C) kontaktörü devreye bağlanır. Kapanan (C) kontağı (R3) yol verme direncini kısa devre eder. Böylece endüvi normal şebeke gerilimine bağlanır.
Motorun normal geriliminde çalışması, durdurma butonuna basılıncaya kadar devam eder. (C) kontaktörü enerjilenince, normalde kapalı (C) kontağı açılır. (P1) devir ayar reostası şönt sargıya bağlanır. Motorun devir sayısı önceki ayarlandığı değere yükselir. Yol verme dirençleri, motorun devir sayısına bağlı olarak devreden çıkarlar.
BİR FAZLI YARDIMCI SARGILI ASENKRON MOTORLARA YOL VERME
Asenkron motorlarda dönme hareketini, döner manyetik alan sağlar. Döner manyetik alanı da stator sargıları yaratır. Döner alan yalnız iki ve üç fazlı sistemlerde meydana gelir. Bir faza bağlı bir sargı ile, motorda döner alan yaratılamaz. Yalnız böyle bir motora yol verilirse, motordaki bir sargı dönüşü devam ettirir. Bu sargıya ana sargı adı verilir.
Bir fazlı asenkron motorlarda ilk hareketi sağlamak için, ana sargıya göre 90 derecelik açıyla yerleştirilmiş ikinci bir sargı daha kullanılır. Motordaki ikinci sargıya yardımcı sargı denir. Bu sargı, asenkron motorun iki fazlı bir motor gibi çalışmasını sağlar. Yardımcı sargıya seri olarak bir kondansatör bağlanır. Kondansatör, ana ve yardımcı sargı akımları arasında 90 dereceye yakın bir faz farkı yaratır. Bir fazlı asenkron motorların bazılarında, yardımcı sargı devamlı olarak devreye bağlı kalır. Bazılarında ise devrin %75 inde elle veya otomatik çalışan bir elemanla devreden çıkartılır.
Örnek 1 : Şekilde bir fazlı yardımcı sargılı asenkron motora yol vermede kullanılan bir bağlantı şeması verilmiştir. Bu devrede başlatma butonuna basıldığında, (ZR) zaman rölesi ile (M) ve (A) kontaktörleri enerjilenir. Kapanan (M) kontağı, başlatma butonunu mühürler ve sürekli çalışmayı sağlar. Güç devresinde (M) ve (A) kontakları kapanır. Ana ve yardımcı sargı şebekeye bağlanır. Böylece asenkron motor yol almaya başalr. Devir sayısı normal değerine yaklaşırken, (ZR) zaman rölesi (ZR-GA) kontağı açar. (A) kontaktörü ve dolayısıyla yardımcı sargı devreden çıkar. Durdurma butonuna basılıncaya kadar motor ana sargıyla dönmeye devam eder.
Kumanda devresi |
Güç devresi |
İlgili animasyon için tıklayınız…
YILDIZ-ÜÇGEN ŞALTERLE YOL VERME
Bir şebekede üçgen bağlı olarak çalışacak üç fazlı bir asenkron motor, yol vermede yıldız bağlanırsa, faz bobinleri 1,73 kat daha az bire gerilimle çalışır. Motorun yol alma akımı yaklaşık olarak üç kat azalır. Yıldız bağlı olan motor düşük gerilimle yol almaya başlar. Yol almanın uygun bir anında, ilk önce motorun faz sargıları arasındaki yıldız bağlantı açılır. Sonra motor faz sargıları üçgen olarak bağlanır. Böylece motor normal geriliminde çalışmaya devam eder.
Bu yol verme yönteminde diğer yol verme yöntemlerinde olduğu gibi aracı bir eleman (direnç veya reaktans gibi) kullanılmaz. Sadece motorun bağlantı şekli değiştirilerek gerçekleştirilebilir. Amaç, motorun sargılarına uygulanan gerilimi azaltmak suretiyle motorun çektiği kalkış akımını azaltmaktır. Motor başlangıçta yıldız bağlanır, yol altıkdan sonra (devir sayısı %60-%65’e ulaştığında) üçgen bağlantıya geçilir.Pratik ve en ucuz bir yol verme yöntemidir. Ancak bu yöntemin uygulanabilmesi için motorun bağlanacağı kaynağa yıldız çalışabilmesi şarttır. Diğer bir ifade ile bu yöntemin uygulanacağı motorun üçgen geriliminin, bağlanacağı şebekenin fazlar arası gerilimine eşit olması gerekmektedir.
Güç açısından ise 4,5 – 5kW’dan daha büyük motorlara uygulanmalıdır. Bu yol verme yöntemini gerçekleştirmek için özel olarak bu iş için hazırlanmış pako şalterler bulunmaktadır.
Örnek 1 : Şekilde üç fazlı bir asenkron motora otomatik yıldız üçgen şalterle yol vermede kullanılan bir bağlantı şeması verilmiştir. Bu devrede başlatma butonuna basıldığında, (M) ve (A) kontaktörleri enerjilenir. Güç devresinde (M) ve (A) kontakları kapanır. Kapanan (A) kontakları (X), (Y), (Z) sargı uçlarını kısa devre ederler. (U), (V), (W) sargı uçları da kapanan (M) kontaklarının üzerinden (R), (S), (T) fazlarına bağlanırlar. Böylece motor yıldız bağlı olarak düşük gerilimle yol almaya başlar. Kumanda devresinde kapanan (M) kontağı başlatma butonunu mühürler ve sürekli çalışma sağlar. (M) ve (A) kontaktörleriyle birlikte (ZR) zaman rölesi de enerjilenir. Bir süre sonra (ZR) kontaklarının durumu değişir. (ZR-GA) kontağı açılır ve (A) kontaktörü devreden çıkar. (ZR-GK) kontağı kapanarak (B) kontaktörünü enerjilendirir. Güç devresinde (X), (Y), (Z) sargı uçlarını kısa devre eden (A) kontaktörünün iki kontağı açılır. Kapanan (B) kontakları (U) sargı ucunu (Z) sargı ucuna, (V) sargı ucunu (X) sargı ucuna, (W) sargı ucunu (Y) sargı ucuna bağlar. (M) kontakları sürekli olarak kapalı kaldıklarından, (B) kontakları kapanınca faz sargıları normal şebeke gerilimine bağlanır. Böylece motor üçgen bağlı olarak normal çalışmaya başlar.
 Kumanda devresi Kumanda devresi |  Şalter bağlantısı Şalter bağlantısı |
İlgili animasyon için tıklayınız…
Kumanda devresinde (B) kontaktörü enerjilenince, normalde kapalı (B) kontağı açılır. Çalışan (ZR) zaman rölesi devreden çıkar ve (ZR-GK) kontağı açılır. (B) kontaktörünün sürekli çalışması, kapanan (B) mühürleme kontağıyla sağlanır. Normalde kapalı (B) ve (A) kontakları, elektriksel kilitleme yaparlar. Bu kontaklar (A) ve (B) kontaktörlerinin beraber çalışmalarına ve bir kısa devrenin doğmasına engel olurlar. Durdurma butonuna basıldığında, çalışan (M) ve (B) kontaktörleri devreden çıkar ve motor durur.
Yıldız – Üçgen Yol Vermede Akım, Güç ve Moment
Motor yıldız çalıştırılırken faz (motor) sargılarına uygulanan gerilim az olmakta, motorun çektiği akım da azalmaktadır. Pratik olarak güç, moment ve akımdaki azazlma miktarı ![]() kadardır. Çünkü yıldız çalışmada sargıdan geçen akım, üçgen çalışma akımından
kadardır. Çünkü yıldız çalışmada sargıdan geçen akım, üçgen çalışma akımından ![]() kat daha küçüktür. Ancak teorik hesaplamalarda akım, güç ve momentteki azalmanın daha fazla olduğu görülmektedir.
kat daha küçüktür. Ancak teorik hesaplamalarda akım, güç ve momentteki azalmanın daha fazla olduğu görülmektedir.
Görüldüğü gibi üçgen çalışabilecek motor, yıldız çalıştırıldığında, çekeceği akım 1/3 oranında azalmaktadır. Dolayısıyla güç ve moment de 1/3 oranında azalacaktır. Bu nedenle yıldız-üçgen yol vermede motorun yıldızda bırakılmaması gerekmektedir.
Bölüm-5 FRENLEME TEKNİKLERİ
Hazırlayanlar: Haluk KARAHAN ve Savaş KILINÇ
Ana Yazı: Elektrik kumanda teknikleri ders notları
Yayım tarihi: 2009/04/22 Etiketler: endüstriyel elektrik, motor yol verme, yol verme
3fazlı asenkron bir motora iki kademeli dirençle ileri geri yol verme güç ve kumanda devre şeması konusunda yardımlarınızı beklerim saygılarımla