
Robotun kontrolü AT90S2313 mikrodenetleyici ile sağlanmış işlemci 4mhz çalıştırılıyor kumanda için rc5 protokolü kullanan herhangi bir kumanda kullanılabilir robotun çalışmalası için 4 adet 2200mAh NiMH pil kullanılmış deneme için alkalin pilde kullanılabilir (motorlar fazla güçlü değilse) Projeye ait şema ve kaynak c yazılımı var.
Mekanik kısmıda pratik olmuş iskelet genel olarak bakır borular ve pcb plaket parçaları lehimlenerek yapılmış ön kısmın dengesi ilerleme içinse pinpon topu kullanılmış.

Robot Artık otonom davranış algoritmalarına sahip değil, tamamen RC5 kullanan bir TV uzaktan kumandasının kontrolü altında. Bu, esas olarak kodu çözülmüş RC5 protokolünün nispeten pratik bir kullanımıdır.
Bilgi işlem gücü, programın ana parçası olarak, çıkışı 36kHz taşıyıcı dalga olmadan zaten kullanışlı bir sinyal olan IR alıcısı SFH506-36’nın çıkışı olan PB.7 pinini okuyan 4MHz’de saat hızına sahip AT90S2313 tarafından sağlanır. Pin PB.7’de düşen bir kenar algılanırsa, RC5 protokolü alım algoritması başlar ve LED yanıp söner.
Tüm çerçevenin alımının tamamlanması için bir gecikme prosedürü ile bekler ve başlangıç biti örnekleri doğruysa, ilgili transistörleri açmak için doğru kombinasyon H-Bridge’e gönderilir (RC5 çerçeve algılama algoritması hakkında daha fazla ayrıntı) Burada). Bu değer 200ms boyunca kendini korur (bu, C/T1 kesinti prosedürü tarafından sağlanır), bundan sonra robot kendini durdurur. Yani RC5 sinyali sürekli alınırsa (RC5 için iletim süresi 114ms) robot fade-out sonrası bir hareket yapacak ve 200ms sonra kendi kendine duracaktır.
Robotun hareketi, uzaktan kumandanın sayısal kısmı tarafından çok yönlü bir şekilde kontrol edilir. Yani örneğin 2 – ileri, 8 – geri, 1 – ileri-sağa yarım dönüş (sol motor durur ve sağ motor ileri gider, sadece bir motor aktif olduğu için hareket yavaştır), benzer şekilde 3 , 7 ve 9, düğmeler 4 ve 6 sola/sağa döner. Sadece ek olarak 5 – kırmızı LED ve 0 – yeşil LED vardır.
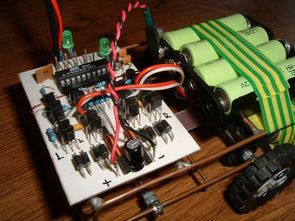
Hareketi iyileştirmek için ön tekerlekler yerine bir pinpon topu kullanılır, bu da engebeli arazide bile çok daha iyi dönüş olanakları sağlar. Bir pinpon topunun kullanılması, elektroniğin olduğu yeri kaplıyordu ve bu nedenle, elektronik aksamın bulunduğu PCB’yi koyacak bir yere sahip olmak için topun yüksekliğini aşan bir tür üst yapı oluşturmak gerekiyordu. . Üst yapı yine Cu telden yapılmış ve lehimlenerek birleştirilmiştir.
Motorlar 6V sıradan modelleyicilerdir, Cu tel konstrüksiyona izolasyon bantları ile sabitlenirler, kullanılan dişli kutusu 1:20 oranlı bant sayacından sonsuz dişlidir. Güç kaynağı, daha iyi dönüş için dönme ekseninin üzerine (motorlar arasında) uygun şekilde yerleştirilmiş 4 adet NiMH 2200mAh pil ile sağlanır, pil paketinin kalıcı konumu yalıtım bandı ile sağlanır. SFH506-36 opto-alıcı 15 cm yüksekliğinde bir direk üzerine yerleştirilmiştir ve böyle bir “anteni” andırır, SFH ile birlikte anten üzerinde güç kaynağı için bir RC filtresi de vardır.
Şifre-Pass: 320volt.com
Yayım tarihi: 2012/01/01 Etiketler: AT90S2313, atmel avr projeleri, kumandalı robot, rc5, remote robot, robot circuit, robot devresi, robot projeleri robotlar