
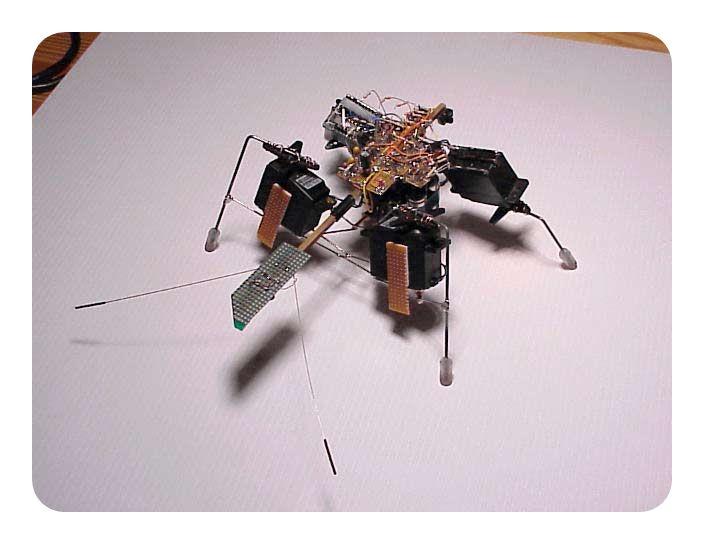
Robot yapmak için illaki mikrodenetleyici gerekmez güzel bir örnek bu kadar karmaşık mekanik yapıda nasıl çalışmış hayret güzel bir çalışma bacaklı robot böcek. Işığa doğru giden ve engellerden kaçınan beş motorlu bir yürüteçtir. Amaç, en parlak ışık kaynağını ararken engebeli karmaşık arazide gezinebilen bir yürüteç yaratmaktı. Yürüteç için temel denetleyici, dört ana/köle bağlantılı çift çekirdeklidir. Diğer tüm devreler, sensörlerden girdi alır ve yürüteçi yedeklemek, döndürmek ve ışık aramak için çift çekirdeklerden gelen sinyali değiştirir.
Ön ayakları kaldırarak ileri doğru yürüyün Arka ayakları kaldırarak ileri doğru yürüyün Geriye doğru yürüyün Sağa sapmış ~2′ dönüş yarıçapı Sola doğru sapmış ~2′ dönüş yarıçapı
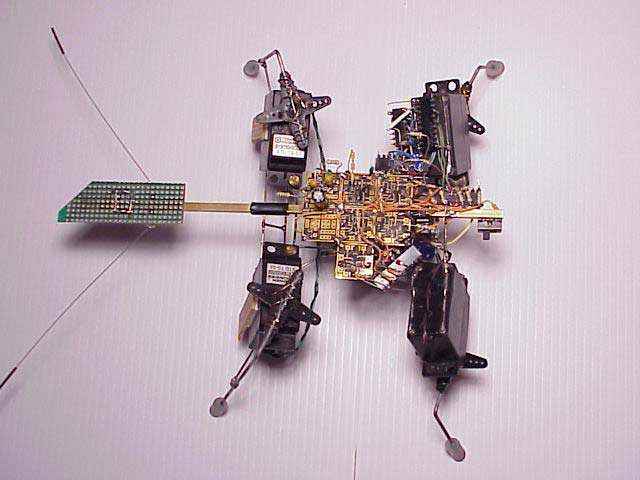
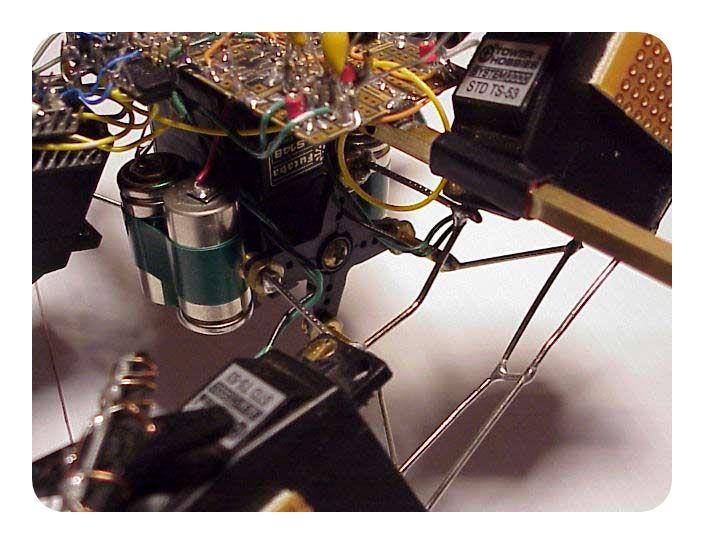
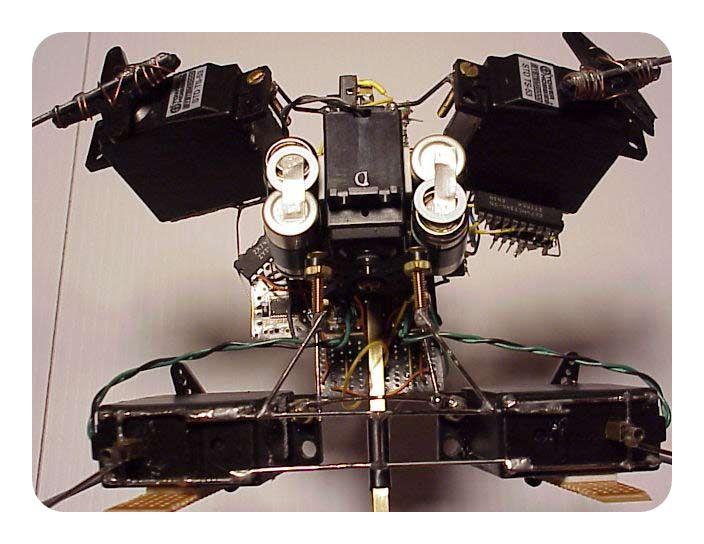
1. Açma-Kapama anahtarı
2. Yürüteci sola ve sağa döndürmek için ters çeviriciler.
3. Işık aramayı kontrol etmek için kullanılan kısım
4. Bicore. Bu noktada hiçbir şey için kullanılmaz.
5. Bacakları kontrol eden bicores.
6. Yürüteç’in geri gitmesine neden olan ters çevirici
7. Yedekleme için zamanlayıcı kondansatörü.
8. Pil Değiştirici (görünmez)
Notlar: Gösterilmeyen tek şey motor sürücüleridir. Her servoyu sürmek için paralel olarak iki set üç adet 74AC240 invertör kullandım. Herhangi bir sürücü çalışacaktır, bu nedenle (M)’yi istediğiniz sürücüyle değiştirin. İşte benimki neye benziyordu…
Böcek robot tasarımı birkaç bölümden oluşur:
I) Işık detektörü, 3 çıkış durumunu kontrol eden etkinleştirme sinyallerini üretmek için F(2),J(2),K(1),L(1) grubundan invertörler ve bir 2 giriş VE geçidi kullanır: a. sola dön b. sağa dön, c. Düz gidin
II) İki ana çift çekirdekli, dalga biçimleri %25 oranında üst üste gelecek şekilde karelemede salınacak şekilde 7.2M dirençle birleştirilmiş B(2) ve C(2) gruplarından invertörler kullanır. Bunlar, iki arka ayağı kontrol eden motor sürücülerine (Ian her motor için 6 74AC240 invertör kullanmıştır) bağlıdır.
III) İki ön motor yardımcı çift çekirdekli, bağımlı çift çekirdekli çıkışını yaklaşık %25 oranında geciktiren zamanlama bileşenlerine sahip D(2) ve E(2) gruplarından invertörler kullanır. Bunlar ön bacak motor sürücülerine bağlıdır (her motor için 6 invertör).
IV) İki ön motor ters çevirici devresi ve LED göstergesi, H(3), I(3) gruplarından invertörler kullanır ve dönüşü kontrol etmek için her bir ana çift çekirdeğin (arka ayaklar) ve bağımlı çift çekirdeğin (ön ayaklar) çıkışları arasına bağlanır. ışık detektörü devresinden gelen etkinleştirme sinyalleri ile. Her iki ters çevirici de kapatıldığında, yürüteç düz hareket eder.
V) Bir bel ikincil çift çekirdekli devre, bel motor sürücüsünü kontrol etmek için grup A(2)’den invertörler kullanır (altı adet 240 invertör kullanarak). Aslında (bildiğim kadarıyla) bu köle bicore hiç gerekli değil (bkz. VI).
VI) Bel invertörü, G(2) grubundan invertörler kullanır ve iki ana çift çekirdeğin her birinin bir çıkışı ile V’deki bel bağımlı çift çekirdekli devre arasına bağlanır. Bildiğim kadarıyla ters çeviricinin çıkışı doğrudan bel motor sürücülerine bağlanmalıdır. Bel ters çevirme devresi, çarpışma ile tetiklenen iki dokunsal anahtardan biri ile etkinleştirilir.
VII) Güç kaynağı, açma kapama anahtarlı 4.8V NiCd pilden oluşur ve pil takımını yürüteçten çıkarmadan şarj etmek için bir redresör dahildir.
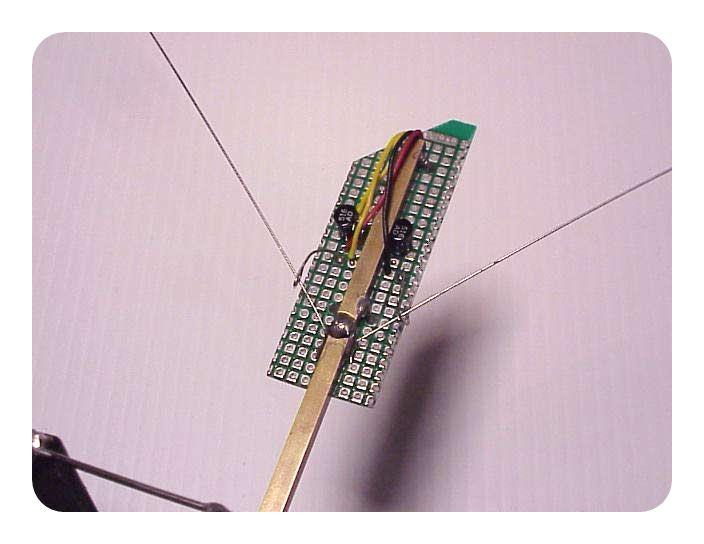
Işık dedektörü, iki fotodiyot üzerinde ışık seviyesinin dengeli veya dengesiz olduğunu algılamak için bir “foto köprü” olarak iki fotodiyot kullanır. 2 fotodiyot bağlanır






Kaynak: beam-online.com/Robots/vwalker1/index.html (kapalı)
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/12/15 Etiketler: 7408, 74ac240, bocek robot, mekanik, robot projeleri robotlar
güzel bir icat bunu casus dinlemeler için karanlıkta saklanacağı yerler bulacak şekilde yürüyüp saklanması için, pıc ile tasarlayıp bide küçük radyo vericisiyle ortamdaki sesi yayınlasa baya bi işe yarar tabi yakalınıp ezilmezse 😀 😀
güzel bi casus böcek ama biraz değilmi bunu hızlandırmak için motor hız kontrol devreside kullanılsa daha iyi olur ve ayrıca bu böceğin baskı devre şeması ve malzeme listesi varsa lütfen msj olarak gönderirmisiniz site:
mailto: