

PIC-16F628 RF Kontrollü Araç projesi İrfan MEVSİM tarafından hazırlanmış oldukca faydalı bir çalışma Emeği geçen hazırlayan kişilere teşekkürler
![]()
Projede kullanılacak RF mödüller ile bilgi transferi için Visual Basic 6.0 Görsel Programlama Dili kullanılmıştır.Projede PIC16F628 mikrodenetleyicisi kullanılmıştır. Mikrodenetleyici seçiminde birçok nokta dikkate alınmıştır. Öncelikle temel işlemleri yapabilen , bunun yanı sıra sahip olduğu fiyat ve donanım v.b. avantajları ile sınıfındaki diğer PIC’lerden üstün olması nedeniyle PIC16F628’in kullanılmasına karar kılınmıştır.
RF Kontrollü Araç Tasarımı Projesi Raporu
Projede kullanılacak RF mödüller ile bilgi transferi için Visual Basic 6.0 Görsel Programlama Dili kullanılmıştır. Yapılan arabirim programı şimdilik sadece deneme amaçlı olduğundan temel olarak sadece bir butona basıldığında seri bilgi göndermektedir.
Program girilen binary bilgiyi MSComm32.ocx companent ini kullanarak bilgisayarın seri portuna iletir. Programda 3 adet farklı bilgi gönderilmesinin sebebi belirli bir protokol geliştirilmiş olmasıdır. Bu protokole göre ilk olarak decimal 103 bilgisi daha sonra decimal 104 bilgisi ve en sonunda da gerçekten göndermek istediğimiz bilgi gönderilmektedir.
Mikroişlemci tarafı bilgiyi aldığı zaman ilk olarak 1. önbilginin gelip gelmediği kontrol eder eğer geldiyse 2. önbilginin gelip gelmediğini kontrol eder eğer buda geldiyse 3. olarak gelen bilgiyi alır ve gerekli işlemleri bu 3. bilgi doğrultusunda gerçekleştirir. Ayrıca program temel düzeyde olduğundan kolay anlaşılabilmesi için girilen binary bilginin hexadecimal, decimal ve ASCII karşılığını da göstermektedir. Program kodları ve arayüzün görünüşü aşağıda verilmektedir.
Programın çalışma görüntüleri

Visual Basic 6.0 ile gerçekleştirilen seri bilgi gönderme programının kaynak kodları
Private Sub bilgigönder_Click() Dim dec_sayi As Integer dec_sayi = (((Text1.Text) * 1) + ((Text2.Text) * 2) + ((Text3.Text) * 4) + ((Text4.Text) * 8)_ + ((Text5.Text) * 16) + ((Text6.Text) * 32) + ((Text7.Text) * 64) + ((Text8.Text) * 128)) Text9.Text = dec_sayi 'Binary sayının decimal karşılığı Text10.Text = Hex(dec_sayi) 'Binary sayının hexadecimal karşılığı Text11.Text = Chr$(dec_sayi) 'Binary sayının ASCII kod karşılığı For i = 1 To 10 'Bilginin kesin gitmesi için 10 defa aynı bilgi 'gönderiliyor MSComm1.Output = Chr$(103) '1. Önbilgiyi gönder MSComm1.Output = Chr$(104) '2. Önbilgiyi Gönder MSComm1.Output = Chr$(dec_sayi) 'Gerçek Bilgiyi Gönder Next i End Sub Private Sub CIKIS_Click() End End Sub Private Sub Form_Load() Text1.Text = "0" Text2.Text = "0" Text3.Text = "0" Text4.Text = "0" Text5.Text = "0" Text6.Text = "0" Text7.Text = "0" Text8.Text = "0" Text9.Text = "" Text10.Text = "" Text11.Text = "" MSComm1.Settings = "2400,N,8,1" ' Seri port konfigürasyonlarının ayarlanması MSComm1.CommPort = 1 ' COM1'in seçilmesi If MSComm1.PortOpen = False Then ' Port açıkmı kapalımı bak MSComm1.PortOpen = True ' Eğer kapalı ise aç End If End Sub
Projede araç ile bilgisayar arasındaki iletişimi sağlamak UDEA Elektronik Ltd. firmasının üretmiş olduğu ARX-34 UHF ASK Data Receiver ve ATX-34 UHF ASK Data Transmitter alıcı-verici modülleri kullanılmıştır. Bilgisayar tarafından gönderilen bilgilerin alıcı tarafından alınarak yorumlanması ve aracın fonksiyonlarını yerine getirebilmesi için MicroChip firmasının üretmiş olduğu PIC16F628 mikrodenetleyicisi kullanılmıştır.
Mikrodenetleyici seçiminde birçok nokta dikkate alınmıştır. Öncelikle temel işlemleri yapabilen , bunun yanı sıra sahip olduğu fiyat ve donanım v.b. avantajları ile sınıfındaki diğer PIC’lerden üstün olması nedeniyle PIC16F628’in kullanılmasına karar kılınmıştır. PIC16F628’in kullanılmasındaki nedenler , yaygın olarak kullanılan ve benzer yapıdaki PIC16F84 ile karşılaştırılarak aşağıda sıralanmıştır.
PIC16F84 en fazla 10MHz hızında çalışabilirken PIC16F628 en fazla 20MHz hızında çalışabilmektedir.
Bu PIC 16F628’in işlemleri 2 kat hızlı yapabilmesine olanak sağlamaktadır.
PIC16F84’ün program belleği 1K iken PIC16F628’in program belleği 2K’dır. Ayrıca PIC16F628’in RAM belleği ve EEPROM veri belleği PIC16F84’ün iki katından daha fazladır.
PIC16F84, 13 giriş/çıkış (I/O) ucuna sahipken, PIC16F628’de 16 giriş/çıkış (I/O) ucu vardır.
PIC16F628’in sahip olduğu 37KHz/4MHz’lik dahili osilatör ile, PIC16F84’ün çalışması için gerekli olan harici osilatöre olan ihtiyaç ortadan kaldırılmıştır. Böylece fazladan 2 adet I/O ucu kullanılabilmektedir.
Ayrıca MCLR ucu isteğe bağlı olarak giriş ucu olarak da kullanılabilmektedir.
PIC16F84’de sadece 8-bitlik bir zamanlayıcı (TIMER) varken PIC16F628’de iki adet 8-bitlik ve bir adet 16-bitlik zamanlayıcı bulunmaktadır.
PIC16F628’de PIC16F84’de bulunmayan analog karşılaştırıcı modülü, PWM modülü ve seri haberleşmeye donanımsal olarak olanak sağlayan USART/SCI (Univeral Synchronous / Asynchronous Receiver / Transmitter) mödülü bulunmaktadır.
Ayrıca PIC16F628’in fiyatı PIC16F84’e göre daha düşüktür Bu avantajları ile PIC16F628, mikrodenetleyiciler ile uygulama geliştirme için oldukça geçerli özelliklere sahiptir. Gerçekleştirilen projede de bilgisayar tarafından gönderilen seri bilgilerin alınması için PIC16F628’in USART mödülü kullanılmıştır. USART alıcı blok şeması Şekil.1’de verilmektedir. RB1/RX/DT ucundan alınan veri, veriyi yeniden elde etme (data recovery) bloğuna gider. Veriyi yeniden elde etme bloğu gerçekte simge hızının 16 katında çalışan bir kaydırıcıdır.
Ana alıcı seri kaydırıcı simge hızında (FOSC’de) çalışır. Sadece eş zamansız modun seçilmesi durumunda (projede eşzamansız mod kullanılarak haberleşme gerçekleştirilmektedir) RSTA saklayıcısının CREN (4.) biti “1” yapılarak verinin alımı aktif hale getirilir.
Şekil.1 USART alıcısı blok şeması

Eşzamansız veri alımı için yapılması gerekenler aşağıda adım adım listelenmiştir.
1. İstenilen simge hızı için SPBRG saklayıcısına gerekli değer yüklenir.Yüksek simge hızı isteniyorsa TXSTA saklayıcısının BRGH (2.) biti “1” yapılır. Projemizde kullanılan alıcı-verici modüller max. 2400bps hızında çalışabildiklerinden dolayı biz haberleşme hızını 2400bps yapmak ve düşük simge hızını (BRGH 2. biti=0) seçmek için SPBRG saklayıcısına d’25’ bilgisini yükledik.
2. Eşzamansız çalışma modunu seçmek için TXSTA saklayıcısın SYNC (4.) biti “1” ve seri portu aktif yapmak içinde RCSTA saklayıcısının SPEN (7.) biti “1” yapılır.
3. Kesme kullanımı isteniyorsa PIE1 saklayıcısının RCIE (5.) biti “1” yapılır. Biz projemizde kesme kullanmadığımız için bahsedilen biti “1” yapmadık.
4. 9 bitlik veri alımı isteniyorsa , RCSTA saklayıcısının RX9 (6.) biti “1” yapılır. Biz projemizde sadece 8 bitlik bilgi kullandığımız için RCSTA saklayıcısının 6. bitini “0” yaptık.
5. RCSTA saklayıcısının CREN (4.) biti “1” yapılarak sürekli seri veri alımı aktih yapılır.
6. RCREG saklayıcısı okunarak alınan 8 bitlik veri okunur.
7. Bir hata oluşursa RCSTA saklayıcısının CREN (4.) biti sıfırlanarak hata sıfırlanır.
Bilgisayar tarafından gönderilen bilginin vericiye iletilmesi için Şekil.2’deki devre kullanılmıştır.
Şekil.2 Seri Bilginin Alıcıya Ulaştırılmasını Saylayan Devre Şeması
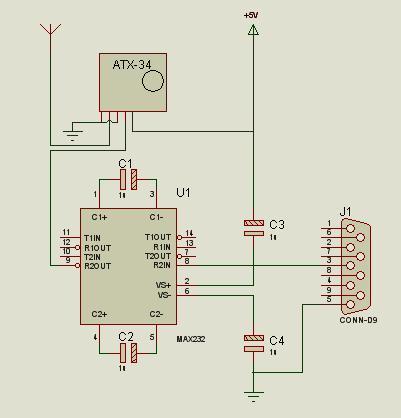
RS-232 ara-birimi TIA/EIA-232 standardında belirtilen şekilde kısaltmaları CD, RD, TD(3), DTR, GND(5), DSR, RTS, CTS, RI olarak belirtilen dokuz farklı sinyal, veri alma, verme ve kontrol amaçlı olarak kullanılır. RS-232’de sinyal gerilim seviyeleri farklıdır. UART’ ın çıkışından gelen lojik “1” sinyali +5 V civarındadır. Bu sinyal RS-232 ara-biriminde lojik “1” olarak (-3 V) ile (-15 V) arasında bir sinyale dönüştürülür.
Aynı şekilde lojik “0” da (+3 V) ile (+15 V) arasında bir sinyale dönüştürülür. Bilgisayardan gelen sinyal seviyesini bir TTL/CMOS uyumlu yonganın kullanabileceği sinyal seviyesine dönüştürmede, aynı şekilde tam tersi, yani dış dünyadan gelen bilgiyi RS-232 ara-birimi standart sinyal seviyesine dönüştürme işlemine en iyi cevap verecek şekilde geliştirilen ve piyasada ucuz olarak bulunan MAX232 entegresi kullanılmıştır.
Bu çalışmada MAX232 entegresi bilgisayarın COM port’undan gelen veri sinyallerinin seviyelerini ATX-34 verici modülünün girişine uygun şekle dönüştürmekte ve tampon görevini görmektedir.
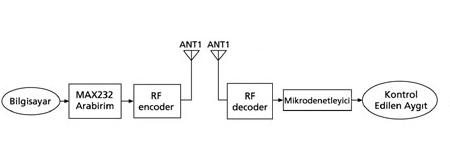
Bu projede esas amaç, bilgisayar ve mikro-denetleyici kullanarak, seri bir haberleşme sistemiyle uzaktaki bir aygıtı otomatik kontrol edebilmektir. Uzaktaki aygıtın ne olduğu önemli değildir. Herhangi bir motor, röle, anahtar gibi elemanlar olabilir. Birden fazla eleman kontrolü de yapılabilir. Şekil.3’te uzaktan kontrol sisteminin blok şeması gösterilmiştir.
Burada kontrol edilecek aygıt olarak bir model arabaya bağlanmış motorlar seçildi. Aygıta sinyal göndermek için RF modülü kullanılmıştır.
Eğer istenirse, bilgi kızılötesi iletişimle de gönderilebilir. RF modülü sistem için daha kararlı çalışmaktadır. Mikrodenetleyici seri bilgi alama portunun girişine UDEA Elektronik Ltd. firmasının üretmiş olduğu ARX-34 UHF ASK Data Receiver ve bilgisayar tarafına da seri bilgi çıkışına ATX-34 UHF ASK Data Transmitter alıcı-verici modülleri yerleştirilmiştir.
Şekil.3 Uzaktan kontrol sisteminin blok şeması
Verici tarafından gönderilen seri bilginin alıcı tarafından alınarak PIC16F628’in seri bilgi alma girişine girilmesini sağlayan devre şeması (Şekil.4) aşağıda verilmiştir. Devredeki PIC16F628’in PORTA uçlarına birer led diyot takılarak verilerin doğru gelip gelmediği kontrol edilebilir.
Şekil.4 Alıcıdan Gönderilen Bilginin Verici Tarafından Alınlarak PIC16f628’e Girilmesini Sağlayan Devre Şeması
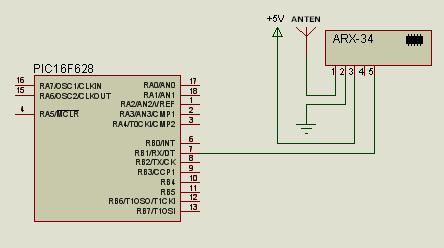
Bilgisayarın seri portundan PIC16F628’e 2400bps hızında gönderilen bilgiyi portA yükleyen program.

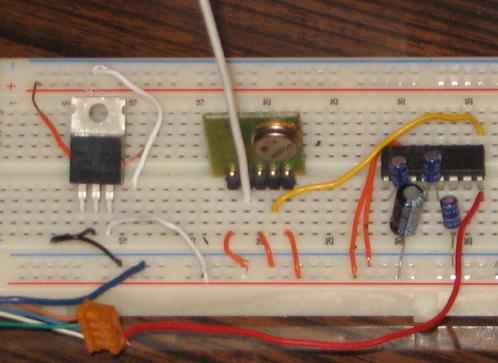
Devrenin Alıcı ve Verici Bölümleri
Projeye ait Visual Basic 6.0 kodları ve devre şemaları;
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/03/02 Etiketler: microchip pic projeleri, pic16f628 rf, rf alıcı verici, rf araba, Visual Basic, visual basic rf
çok teşekkür ederim güzel bir çalışma olmuş.benim amacım bilgisayar kontrollü araç yapmak.bu konuda bi cevap yazarsan çok sevinirim şimdiden teşekkürler…
merhaba
bilgisayar bölümünde okuyorum. sistem analizi dersinden bi proje yapmam gerekiyor. bir araca takılan vericiyi karşıdaki algılayıcı alacak ve delphide bu aracın kime ait olduğunu bana yzacak. delphi bölümü kolay ama elektronik konusunda hiç bir bilgim yok. bana bu konuda yardımcı olursanız sevinirim.şimdiden teşekkür ederim.
bilg. kontrollu oyu”ncak araba benim bitirme tezim bu program benim işime yarar mı?
mrb ben hacettepe üniversitesinde okuyorum.visual basic kodlarıyla çalıştırmam gereken bir ödevim var kumanda devresi yaptım fakant değişken atayamıyorum çünkü kumandanın bir tuşuna elim basılı kalırsa 7-8 adet farklı değişken ortaya çıkıyor bunlarla işlem yapmam müümkün değil.acaba ilk değeri nasıl tutabilirim yada sizce ben bu değişkeni ansıl kullanabilirim çünkü değişkeni tanıtıp visual basic ile işler yapacağım ileri geri kaydet gibi
Dilek hanım
Visual basici çok bilmem ama değişkeni tanımlarken Byte olarak tanıttığınızda sorun devam ediyormu ,belki de söz diziminde, kaç mili saniye girişi kontrol edeceğinin değerinide girmeniz gerekiyordur?
Birde PIC için program yazarken,butona basıldı bilgisini alırken XOR çıkışı gibi düşünmeniz gerekiyordu sanırım (yani butondan net bir HIGH ve LOW alabilmek için)
merhaba.
öncelikle çok güzel olduğunu belirtmek istiyorum.emeğinize sağlık.
benim bitirme projem akıllı ev ve rf haberleşme.pic16f628A mikroişlemcisini kullanıyorum.programımı ASM ile yazdım fakat verici tarafta sorun yaşadım.burda alıcı taraf için olan kısım var.acaba setlemeleri aynı mıdır?
teşekkür ediyor,iyi çalışmalar diliyorum
Bu devreyi yaptım fakat alıcı kısmında ilk dört biti hatasız alıyorum 5. ve 6 . bitlerde çıkış alamaıyorum 7.bit ise sürekli yanmakta 8. ve son bitte sorun yok.acaba sorun nerden kaynaklanıyor teşekkürler
Slm arkadaşlar 😉 ben bu projeyi ve dosyalarını önemli bilgileri indirmek istiyorum ve bu devreyi yapmak ama link başka siteye yönleniyor dosyalar o sitedemi yoksa link mi yanlış bilgilendirirseniz sevinirim şimdiden teşekkürler
🙁
Evet eski domain hyperelektronik süresi dolmuş bir çok dosya için orayı kullanıyordum tüm linkleri yenilemem gerekecek neyse dosya link yenilendi indirebilirsiniz
arkadaslar ben bu tur bir proje gerceklestirdim isteyen inceleyebilir. Arama kesif araci sitemde ve video google da videolari var.
ozkan cinar
Elektronik ogretmeni
ozkancinar.blogspot.com
tesekkurler… 😉
bende bu modülü sipariş ettim, paylaşımınız için teşekkürler.
paylaşım teşekkürler…
devreyi simülasyonda kuruyorum fakat her seferinde gelen sinyalin tersini alıyor sizce normal mi sadece simülasyonda mı böyledir sizce ne yapmam gerekir?