
Hazırkalayn: Utku YILMAZ – Otomatik kontrollü bir mobil araç projesi mobil robot kontrol katı pic16f877 üzerine kurulu yazılım assembly ile hazırlanmış devre ve kullanılan malzemeler hakkında detaylı bilgiler bulunuyor. Emeği geçen hazırlayan kişilere teşekkürler
Dört yıllık mühendislik eğitimim sonucunda, robotlara olan ilgimden dolayı, bitirme çalışması olarak özel olarak geliştirdiğim mobil aracın kontrolü üzerinde çalıştım. Bu bitirme çalışması iki kısımdan oluşmaktadır:
- I. Mobil aracın uzaktan kumanda ile kontrolü
- II. Mobil aracın mikrodenetleyici ile otomatik kontrolü
Aracın uzaktan kumanda ile kontrolü kısmı, mobil araca 27Mhz 4 kanallı R/C uzaktan kumada kontrol devresinin uyarlanmasını kapsamaktadır.Bu kısımda elle kumanda edilen R/C verici sayesinde aracın hareket etmesi ve yönlendirilmesi sağlanmaktadır. Aracın otomatik kontrol kısmı ise mikrodenetleyici (PIC16F877) ile ultrasonik
sensörlerden alınan sinyallere göre aracın çevresinde bulunan cisimlere çarpmadan istenilen program doğrultusunda otomatik hareket etmesi sağlanmaya çalışılmıştır.
MOBİL ARACIN MEKANİK YAPISI

- 1- Kendi ekseninde 360 derece dönebilen bağımsız tekerlek
- 2- İçten tahrikli redüktörlü silecek motoru
- 3- 14cm çapında tekerlek
- 4- Ultrasonik sensörler
- 5- Elektrik ve kontrol kutusu (Akü, kontrol kartları vs)
- 6- Anten
- 7- MDF plaka
Araç, şekilden de görüldüğü gibi 3 tekerlekli bir sistemdir.Araca hareket veren ve aracın yönlendirilmesini sağlayan motorlar birbirinden bağımsız kontrol edilmektedir.Önde bulunan teker ise aracın dinamik dengesini sağlamak amacıyla kullanılmıştır ve bu tekere motor bağlı değildir.
Bu mimarinin en büyük avantajı araca dar alanlarda üstün hareket ve manevra kabiliyeti sağlamasıdır.Örneğin sol tarafa dönülmek istendiğinde, sol tekerin geri yönde,sağ tekerinde ileri yönde tahriki ile kendi ekseninde sol yöne dönme işlemi gerçekleşir.İleri yönde hareket etmesi istendiğinde ise iki teker ileri yönde tahriklenerek aracın ileri istikamette gitmesi sağlanır.
İÇTEN TAHRİKLİ REDÜKTÖRLÜ MOTOR
- I. Arka cam sileceği koluna ve süpürgeye direkt hareket verir.
- II. Fırçalı tipli, daimi mıknatıslı DC motor.
- III. Redüktörü, tek dişli invoulit vida ve helisel dişli.
- IV. Tahrik: braketle uyumlu dahili biyel.
- V. Çıkış mili: sağ-sol hareketli mil doğrudan gövdeden çıkışlı.
- VI. Aşırı yükte koruma ile donatılabilir.
- Nominal voltaj: 12V
UZAKTAN KUMANDA KONTROL SİSTEMİ

Radyo kontrol ( R/C ) vericisindeki yönlendirme çubukları sayesinde aracın hangi motorları çalıştırılmak isteniyorsa o motorlara ilişkin yönlendirme yapılır.R/C alıcı vericinin gönderdiği 27Mhzli FM işareti demodüle ederek 5V çıkışlı 4 tane terminalden uygun olanları yetkilendirmektedir.
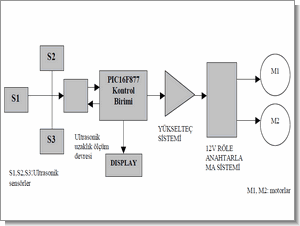
Yükselteç sisteminde R/C alıcının her bir çıkışı işlemsel yükselteçler tarafından kuvvetlenerek 12V röle anahtarlama sisteminin çalışması sağlanmaktadır.Motorların 12Vluk aküler tarafından sürülmesi 12V röle anahtarlama sistemi tarafından yapılmaktadır.
RADYO KONTROL SİSTEMİ
Radyo kontrollü (R/C) araçlar veya cihazlar; uzun mesafeden kontrol sağlamak için radyo frekansı kullanılarak kablosuz, verici vasıtasıyla aracın kumandası sağlanır. [2] Radyo kontrollü araçlar, araca monte edilmemiş elde taşınabilir verici vasıtasıyla kontrol edilir.R/C kontrolü diğer uzaktan kontrol sistemlerinden ayıran fark budur.
Radyo kontrol cihazları, radyo frekansı kullanarak ve taşınabilir verici ile araçla haberleşirler.Bu yüzden Radyo kontrol cihazlarının diğer uzaktan kumanda cihazlarına nazaran daha geniş yayın menzili ve esnekliği mevcuttur.[
OTOMATİK KONTROL SİSTEMİ
PIC sürekli olarak sensörleri kontrol eder.Sensörlerden alınan uzaklık bilgisi belli bir referans değerin altındaysa (Örneğin 10cm) PIC, sensör yazılımı sayesinde motorların hangi yönde döneceklerini yani mobil aracın hangi istikamete gideceğini belirler ve bu duruma ilişkin motorların kontrolünden sorumlu porta çıkış üretir. Bunun yanında PIC sensörlerden okunan mesafe bilgisi eş zamanlı olarak displayde gösterimini de sağlar.
ALGILAYICILAR (SENSÖRLER)
Algılayıcılar (“duyarga” da denmektedir) fiziksel ortam ile endüstriyel amaçlı elektrik/elektronik cihazları birbirine bağlayan bir köprü görevi görürler. Bu cihazlar endüstriyel proses sürecinde kontrol , koruma ve görüntüleme gibi çok geniş bir kullanım alanına sahiptirler.
ALGILAYICILARIN SINIFLANDIRILMASI
Algılayıcıları birbirinden farklı birçok sınıfa ayırmak mümkün. Ölçülen büyüklüğe göre, çıkış büyüklüğüne göre, besleme ihtiyacına göre vb. Aşağıda bu sınıflardan bazılarına değinilecektir.
YER DEĞİŞİMİ VE HAREKET ALGILAYICILARI
Mekanikteki en temel ölçü uzunluk ölçüsüdür. Konum, hareket, yerdeğişimi terimleri birbirine çok yakın durmaktadır. Konum algılayıcı (Position Sensor) yada hareket transdüseri (Motion Transducer) terimlerine sık sık rastlanmaktadır. Yer değişimi transdüseri (Displacement Transducer), teknik olarak en doğru ifade sayılabilir. Temel olarak lineer ve açısal yerdeğişimi algılayıcı olarak ikiye ayrılırlar. Yerdeğişim algılayıcıları ölçme teknikleri açısından aşağıdaki gibi sınıflandırılabilir.
ULTRASONİK SENSÖRLER
Ultrasonik sensörler genellikle robotlarda engellerden kaçmak, navigasyon ve bulunan yerin haritasını çıkarmak amacıyla kullanılmaktadır.Bu türden çalışmaları ilk olarak,Polaroid firması ultrasonik sensörü kullanarak ve bunu bir aletin içine koyup kamera uzaklığını anlayan sistem geliştirmiştir.
MİKRODENETLEYİCİ DENETİMLİ ULTRASONİK UZAKLIK ÖLÇÜMÜ
Alıcı sensöre yansıyarak gelen ultrasonik sinyalin gerilimi yükselteçler tarafından 1000 kat (60dB) kuvvetlendirilir.Bu kuvvetlendirme işlemi iki aşamada gerçekleşir.!00 kat kuvvetlendirme (60dB) ilk katta ve 10 kat kuvvetlendirme (20db) ise 2.katta gerçekleşir. Genellikle işlemsel yükselteçler için pozitif ve negatif güç kaynağı kullanılmaktadır.Bu devrede ise sadece +9V luk besleme kullanılmıştır.Bu yüzden işlemsel yükseltecin pozitif beslemesi için kutuplama gerilimi olarak güç kaynağının yarısı gerilim uygulanmıştır.
İşlemsel yükselteçleri negatif geribesleme ile kullanırken pozitif giriş terminallinin geriliminin genliği ile negatif gerilim terminalinin geriliminin genliği birbirine yaklaşık olarak eşitlenmelidir.Bu işlem sanal topraklama olarak isimlendirilir.Böylece kutuplama gerilimi sayesinde alternatif akım işaretinin her iki alternansı da eşit bir şekilde kuvvetlendirilmiş olur.
Eğer kutuplama gerilim kullanılmazsa, alternatif akım işaretinde bozulmalar oluşur. Bu teknik iki tür kaynak gerektiren fakat bunun yerine tek kaynağın kullanılan işlemsel yükselteçlerle çalışırken sıkça kullanılır.
MOBİL ARACIN MEKANİK YAPISI
İÇTEN TAHRİKLİ REDÜKTÖRLÜ MOTOR
UZAKTAN KUMANDA KONTROL SİSTEMİ
RADYO KONTROL SİSTEMİ
OTOMATİK KONTROL SİSTEMİ
ALGILAYICILAR
ULTRASONİK SENSÖRLER
MİKRODENETLEYİCİ DENETİMLİ ULTRASONİK UZAKLIK ÖLÇÜMÜ
ULTRASONİK MESAFE ÖLÇERİN AÇIK DEVRE ŞEMASI
PIC16F877 KONTROLLÜ ULTRASONİK UZAKLIK ÖLÇÜMÜ
PROSES AÇIKLAMASI
ENTEGRELERİN AÇIKLAMASI
ÜÇGEN DALGA OSİLATÖRÜ
SHOTTKY BARİYER DİYODU
S-R FLIP-FLOBUNUN ÇALIŞMA İLKESİ
SES DALGASININ HAVADAKİ PROPAGASYON HIZI
PIC 16F877
ULTRASONİK UZAKLIK ÖLÇER-KAYNAK KODU
yukarıda özetler verildi;
Şifre-Pass: 320volt.com
Yayım tarihi: 2009/12/01 Etiketler: bariyer diyodu, microchip pic projeleri, mobil robot, PIC16F877 örnekleri, radyo kontrol, robot projeleri robotlar, robot yapımı, ultrasonik sensör
yazandan da, yayınlayandan da “Allah razı olsun.”