
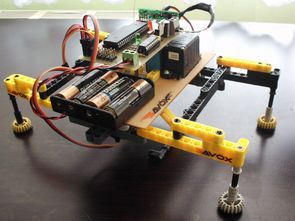
Robot projesinde pic16f877 mikrodenetleyici kullanılmış ARX34 VE ATX34 RF modüller ile uzaktan kantrol edilebiliyor 3 adet servo ile makanik çalıştırılmış yazılım ccs c ile yazılmış alıcı, verici bölümü ise yazarlarımızdan Aykut kardeşimin “PIC16F628 ile 4 kanal alıcı verici RF uygulaması” yazısında paylaştığı uygulamaya ait ayrıca kontrol devresine ait proteus ares ve isis simülasyon, pcb çizimleride bulunuyor.
Hazırlayan: Arda KILIÇ – Emeği geçen hazırlayan kişilere teşekkürler

ARX34 ATX34 modüllerin bağlantı şeması;

pic16f877-arx34-atx34-rf-robot
Şifre-Pass: 320volt.com
Yayım tarihi: 2011/11/19 Etiketler: ARX34, ATX34, bocek robot, microchip pic projeleri, örümcek robot, PIC16F877 örnekleri, rf robot, servo robot
Devrenin yeni ccs c kodları..
#include
#fuses XT,NOWDT,NOPROTECT,NOBROWNOUT,NOLVP,NOPUT,NOWRT,NODEBUG,NOCPD
#use fast_io(a)
#use fast_io(b)
#use delay (clock=4000000)
// R/C Servo motor dönme açı değerleri
const int8 servo_derece_1[]={10,10,16,16};
const int8 servo_derece_2[]={11,14,14,11};
const int8 servo_derece_3[]={14,11,11,14};
const int8 servo_derece_4[]={16,16,10,10};
int16 zaman=0,i=0,duty_0=0,duty_1=0,duty_2=0,pwm=0;
#int_timer0
void kesme ()
{
set_timer0(193);
if (pwm==0)
{
output_high(pin_b0);
output_high(pin_b1);
output_high(pin_b2);
}
if (pwm>=duty_0) output_low(pin_b0);
if (pwm>=duty_1) output_low(pin_b1);
if (pwm>=duty_2) output_low(pin_b2);
zaman++;
// Servo motor dönüş adımları arası bekleme süresi için
if (zaman>=10850)
{
zaman=0;
i++;
if(i==4)
i=0;
}
pwm++;
if (pwm>=460)
pwm=0;
}
/********* ANA PROGRAM FONKSİYONU********/
void main ()
{
setup_psp(PSP_DISABLED); // PSP birimi devre dışı
setup_timer_1(T1_DISABLED); // T1 zamanlayıcısı devre dışı
setup_timer_2(T2_DISABLED,0,1); // T2 zamanlayıcısı devre dışı
setup_adc_ports(NO_ANALOGS); // ANALOG giriş yok
setup_adc(ADC_OFF); // ADC birimi devre dışı
setup_CCP1(CCP_OFF); // CCP1 birimi devre dışı
setup_CCP2(CCP_OFF); // CCP2 birimi devre dışı
set_tris_a(0xFF);
set_tris_b(0x00);
setup_timer_0(RTCC_INTERNAL | RTCC_DIV_1);
set_timer0(193);
enable_interrupts(int_timer0);
enable_interrupts(global);
output_b(0x00); // İlk anda B portu çıkışı sıfırlanıyor
while(TRUE)
{
if (input(pin_a0)) // robot ileri gider
{
duty_0=servo_derece_1[i];
duty_1=servo_derece_2[i];
duty_2=servo_derece_1[i];
}
if (input(pin_a1)) // robot geri gider
{
duty_2=servo_derece_4[i];
duty_1=servo_derece_2[i];
duty_0=servo_derece_4[i];
}
if (input(pin_a2)) // robot geri gider
{
duty_0=servo_derece_1[i];
duty_1=servo_derece_3[i];
duty_2=servo_derece_4[i];
}
if (input(pin_a3)) // robot ileri gider
{
duty_0=servo_derece_4[i];
duty_1=servo_derece_3[i];
duty_2=servo_derece_1[i];
}
}
}
Merhaba arkadaşım bende bu robotu yapmayı düşünüyorum ama mekaniğini temin edebileceğimden emin değilim mekaniği nereden temin edebilirim yardımcı olursan sevinirim birde maliyeti ne kadar tuttu öğrenebilir miyim ? Şimdiden teşekkürler…
merhaba bn bu projeyi yapmak istiyorum rf alıcı, verıcı ve pic16f877 elimde hazır içine attım ama diğer parcaları nerden temin edebilirim mesela sarı renkte olan iskelet şeklindeki parcalar ve diğerleri bir adres site telefon verirseniz çok makbul geçer
robotun mekaniğini legolardan yaptım. 3 tane servo motor kullandım (savöx sg-0351).rc hobi sitelerinden alabilirsiniz servoları.
ortalama maliyeti ne tuttu acaba?
teşekkürler
servolar 30tlx3=90
legolar 30 tl
elektronik devre 40tl
160 tl toplam maliyet
birde legoları nereden temin ettin 2 haftadır arıyorum fakat buna benzer hiçbir şey bulamadım şimdiden teşekkürler
bela lego markası legoların
hangi modelini almamızı tavsiye edersin sen hangisini aldın…
hex kodlamalarını yüklememize rağmen devre proteusta hata veriyor yardımcı olursanız sevinirim
şiimdiden teşekkürler
proteusun versiyonu ile alakalıdır sanıyorum bende düzgün çalışıyor. bendeki 7.7
arkadaşlar özürdilerim hata benim kullandığım proteusta çıktı devre canavar gibi çalışıyor eline emeğine sağlık ARDA kardeş teşekkürler
birde arkadaşım savöx sg-0351 bu servolar piyasada bulunmuyor sen nerden temin ettin ya da yerine önerebileceğin bir servo motor var mı şimdiden teşekkürler.
bu devrede servo motor yerine normal bir kaset çalar (teyp) motoru kullansak olur mu teşekkür ederim
yada başka bir servo motor kullansak olur mu
başka model servo kullanabilirsin.
thk nın hobi sitesinde var. diğer hobi sitelerinde birçok servo modeli var. orta kalitede bir servo işini görür. 10-15tl arası olanların gücü yetmeyebilir robotu yürütmeye.medium boyda metal dişli dijital servo kullanmanı önerebilirim.
Selamın aleyküm arkadaşlar biz mekatronik öğrencisiyiz bir proje ödevimiz var bu robotu yapmayı düşünüyoruz fakat malzeme sıkıntısı çektik tam olarak parça listesi ve malzemeleri nereden temin edeceğimiz hakkında bil
gi vere bilirmisiniz şimdiden teşekkürler…
selamın aleykum ben devreninin herseyini hazırladım fakat mekanik kısmında sorun yaşıyorum legoları nereden aldığını veya marka verebilirsen sevinirim teşekkürler.
selamün aleyküm kardeş şu legolarla ilgili biraz daha bilgi verirsen
hangi siteden bulduysan
kardeş ellerine sağlık çok güzel olmuş ben de yapmayı düşünüyorum becerebilirsem ama mekanik beni zorlıycak heralde rica etsem alttan bir fotografını yayınlarmısın
selamün aleyküm ben devreyi yaptım sayılır da alttan bir fotoğrafını yayınlar mısınız ? teşekürler
birisi yardımcı olabilir mi alttan bir kaç adet fotoğraf yayınlayabilir misiniz ? acillll proje ödevi için yapıyorum sınırlı vaktim varda teşekkürler…
merhaba,çok güzel çalışma tebrik ederim.Projeyi Uyguladım mekanik kısmının dışında eksiksiz olarak çalışıyor.Bu projeyi robot kol a çevirmek için kodları değiştirmeye çalıştım fakat pek başaralı olamadım.acaba robot kol için ne gibi bir değişiklik yapmak gerekir böcek programında(pic16f877a atılan kod).yardımcı olabilirseniz çok sevinirim.iyi çalışmalar
eski bir proje bu robot parçalandı çoktan 😀 alttan resmi yok maalesef. neresinde takıldın onu söylersen yardımcı olmaya çalışalım.
altta ayakları nasıl monte ediyoruz tam olarak onu kavrayamadım benim aklımda olan şu şekil servoyu gövdeye yan monte ediyoruz bacaklarıda direkt olarak servoya monte ediyoruz doğrumu acaba? teşekkurler 😀
evet aynen öyle bu robottada
teşekkür ederim bitirir bitirmez yazacağım iyi çalışmalar .d
devre bitti fakat çalıştıramadım motorların swichini acınca motorlar hareket ediyor ama sonra devrede tık yok
ustam devrede pıcleri 16f877a mı yoksa 877 16f628a mı yoksa 628 mi kullandın ?
saydam kardeşim bu entegrelerin sonundaki a harfi bunların farklı entegreler olduğu anlamına gelmez giriş çıkış portlarına kadar çalışma prensiplerine kadar aynıdır. sadece çalışma gerilimi a harfleri olanlarda fazladır mesela pic16f84 3-5 volt ise pic16f84a 5-15 volt arasında çalışma değeri gösterebilir bunu belirtmek istedim ayrıca eğer bunları bilmiyorsan bence hiç bulaşma bu işe 😉
ustam bunları biliyorumda ben devreye enfazla 6 v uyguluyorum onunda piclerle alakası yok 😀
arda yardımcı olursan sevinirim bu devrenin aynısını bana yapabilirmisin ?