
Kullanılan mikrodenetleyici pic 16f84a 4 Farklı Çalışma programı var 8 adet led kullanılmış anahtar kapatıldığında program çalışmaya başlıyor her anahtar ledlerin farklı şekilde yanması sağlıyor tüm kaynak dosyalar proteus isis simülasyon .DSN ares pcb .LYT Assembly .asm picbasic .bas
Led Animasyon devresinin çalışma örnekleri
![]()
![]()
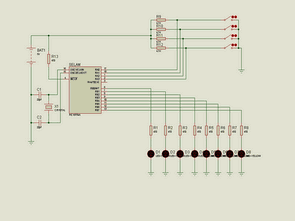
Devre Şeması

Proteus İsis üzerinde Devrenin kurulması ve Çalıştırılması
Bilgisayarımızda isis programını açıp çalıştırdığımızda aşağıdaki gibi boş bir ekran gelecek

Ekranın solunda kalan devices yazan kısımdaki ‘p ’ tuşuna fare ile tıklayarak pick diveces ekranının açılmasını sağlanır. Buradan devre için gerekli malzemeleri alırız.
Pick dveces içindeki kütüphane arama motoruna gerekli olan malzemenin ismini yazarak elemanı çağırabiliriz. İlk önce direnç den başlayarak keywords kutucuğunun içine “resistor” yazdığımızda aşağıdaki ekran karşımıza gelecektir.
Buradan istenen özellikteki direnç seçildikten sonra sağ alt kısımda bulunan “ok” butonuna basarak elemanı tasarım platformundaki elman kutusuna taşımış olduk.

Kondansatör içinde aynı şekilde keywords kutucuğunun içine “capasitor” yazdığımızda aşağıdaki ekran karşımıza gelir ve aynı işlemleri tekrar uygulayarak kopasitörü elman kutusuna taşırız.

Ledleri almak içinde yukarıda ki gibi keywords kutucuğuna “led “ yazarak aşağıda gözüktüğü gibi led kütüphane dosyalarını çağıralır. Eğer kullanılacak ledlerin gözle görünür bir şekilde yanmasını istiyorsanız “category” başlığı altındaki “optoeloktronic”dosyası seçin ve karşınıza çıkan ledlerin hangi renkte olmasını terçih edin.

Devremizde pic kullanındığımızdan dolayı kristale ihtiyacımız var. Bunuda aynen yukarıdaki gibi kütüphane dosyalrında “crystal” olarak tarattırdığımızda karşımıza aşağıdaki ekran gelecektir.kristalide yukarıda diğer elmanlar gibi seçerek elman kutumuza alıyoruz.

Devremizdeki butonları almak için kütüphane dosyalarında “buton” u taratırız ve karşımıza aşağıdaki ekran gelir.

Devremizi beslemek için doğru akım kayanğına ihtiyacımız var bunun için ben batarya kullanıcağım ama başka yolları da vardır. Bataryayı almak için kütüphane dosyalarında “battery” i taratırız ve karaşımıza aşağıdaki gibi bir ekran gelir.

Devremizde en son eleman olarak pic 16f84 ‘ü çağıracağız.kütüphane dosyalarından “pic16f84” diyerekten tarattıdığımızda karşımıza 16f84A gelmektedir . 16f84 ile 16f84A nin arasında bir fark olmadığından dolayı bunu kullanabiliriz.aşağıda ekranda görüldüğü gibi ekran karşımıza gelir ve oradan ok tuşuna tıklayarak pic’i elman kutusuna atarız.

Devrede bize gerekli olacak elemanları seçtikten sonra aşağıdaki şekilde görüldüğü gibi elmanlar hepsi “devices” elemanlar kutusunun içinde yer alacak

Yukarıdaki elman kutusundan elemanları alarak tasarım platformunda devreyi kurarız. Devre için gerekli olan topraklamaları ise inter-sheet terminal tuşunu secerek devices kutusundan alınız.

Simulasyona geçmeden önce son adım olarak pic içine atılması gereken hex dosyadır. Pic in icine hex dosyayı atmak için aşağıda da gözüktüğü gibi pic’in özellikler menüsü açılır. Buradan “program file” satırındaki dosya işaretine tıklanır ve yüklenilmesiistene hex dosya için “aç” penceresi gelir buradan hex dosyası alınır ve soğ üsteki okey e basılır .

Assembly .asm Programı
;**************************************************************************** ;PIC0003.ASM PIC16F84 4 PROGRAMLI 8 LEDLI ISIK SOVU UYGULAMASI ;**************************************************************************** ;**************************************************************************** ; PROGRAM BASLANGICINDA ISLEMCI ILE ILGILI TANIMLAMALAR YAPILMALIDIR ;**************************************************************************** TANIMLAMALAR: list p=16F84 ; DERLEYICIYE ISLEMCI TANITILIR #include; PIC16F84 TANIMLAMA DOSYASI __CONFIG _CP_OFF & _WDT_ON & _PWRTE_ON & _XT_OSC ;**************************************************************************** ; PROGRAMDA KULLANILAN DEGISKENLER TANIMLANMALIDIR ; DEGISKEN TANIMLARKEN DESISKENIN ALACAGI DEGER VEYA HANGI ; RAM HUCRESI OLDUGUNU GOSTERMEK YETERLIDIR ; EQU... ESITLE ANLAMINDADIR ;**************************************************************************** DEGISKENLER: lsb equ H'0020' msb equ H'0021' BASLANGIC: ;**************************************************************************** ; ISLEMCI RESETLENDIGINDE TUM UCLARI GIRIS DURUMUNDADIR ; ISLEMCI UCLARINI ISTENILEN DURUMA AYARLAMAK GEREKIR ; BU ISLEM GEREKTIGINDE PROGRAMIN BASKA ADIMLARINDA DA YAPILABILIR ; TRISA VE TRISB KAYDEDICILERI PIC16F84 UN RAM HAFIZA BOLGESININ IKINCI ; PORTA VE PORTB NIN UCLARININ HANGISININ GIRIS HANGISININ CIKIS ; OLACAGINI BELIRTIR 0=CIKIS, 1=GIRIS. ;**************************************************************************** PORTLARI_AYARLA: CLRF PORTB ; RESET portb CLRF PORTA ; RESET portA BSF STATUS, RP0 ; BANK 1 GECILIR MOVLW B'00000000' ; RB0..7=CIKIS MOVWF TRISB MOVLW B'00011111' ; RA0-5=GIRIS MOVWF TRISA BCF STATUS, RP0 ; BANK 0 GECILIR ;**************************************************************************** ; 4 KONUMLU ISIK SOVU PROGRAMI ;**************************************************************************** PROGRAM: TEST_PORTA: BTFSS PORTA,0 GOTO ALG1 ;PORTA,0="0" ISE ALG1 PROGRAMINA GIDER NOP BTFSS PORTA,1 GOTO ALG2 ;PORTA,0="0" ISE ALG2 PROGRAMINA GIDER NOP BTFSS PORTA,2 GOTO ALG3 ;PORTA,0="0" ISE ALG3 PROGRAMINA GIDER NOP BTFSS PORTA,3 ;PORTA,0="0" ISE ALG4 PROGRAMINA GIDER GOTO ALG4 NOP ; PORTA NIN HICBIR UCU "0" DEGILSE SADECE 1.LED YANIK BEKLER MOVLW B'00000001' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CLRDWT GOTO PROGRAM ;ALGORITMA TEKRARLANIR ALG1: ;********************************************************************* ; SAGDAN SOLA YURUYEN ISIK ALGORITMASI ;********************************************************************* ;1.ADIM MOVLW B'00000001' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;2.ADIM MOVLW B'00000010' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;3.ADIM MOVLW B'00000100' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;4.ADIM MOVLW B'00001000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;5.ADIM MOVLW B'00010000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;6.ADIM MOVLW B'00100000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;7.ADIM MOVLW B'01000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;8.ADIM MOVLW B'10000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME GOTO PROGRAM ;ALGORITMA TEKRARLANIR ALG2: ;********************************************************************* ; SOLDAN SAGA YURUYEN ISIK ALGORITMASI ;********************************************************************* ;1.ADIM MOVLW B'10000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;2.ADIM MOVLW B'01000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;3.ADIM MOVLW B'00100000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;4.ADIM MOVLW B'00010000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;5.ADIM MOVLW B'00001000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;6.ADIM MOVLW B'00000100' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;7.ADIM MOVLW B'00000010' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;8.ADIM MOVLW B'00000001' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME GOTO PROGRAM ;ALGORITMA TEKRARLANIR ALG3: ;********************************************************************* ; ALG3 ISIK ALGORITMASI ;********************************************************************* ;1.ADIM MOVLW B'00000001' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;2.ADIM MOVLW B'00000011' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;3.ADIM MOVLW B'00000111' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;4.ADIM MOVLW B'00001111' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;5.ADIM MOVLW B'00011111' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;6.ADIM MOVLW B'00111111' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;7.ADIM MOVLW B'01111111' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;8.ADIM MOVLW B'11111111' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;9.ADIM MOVLW B'11111110' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;10.ADIM MOVLW B'11111100' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;11ADIM MOVLW B'11111000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;12.ADIM MOVLW B'11110000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;13.ADIM MOVLW B'11100000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;14.ADIM MOVLW B'11000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;15.ADIM MOVLW B'10000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;16.ADIM MOVLW B'00000000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME GOTO PROGRAM ;ALGORITMA TEKRARLANIR ALG4: ;********************************************************************* ; ALG4 ISIK ALGORITMASI ;********************************************************************* ;1.ADIM MOVLW B'10000001' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;2.ADIM MOVLW B'01000010' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;3.ADIM MOVLW B'00100100' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;4.ADIM MOVLW B'00011000' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;5.ADIM MOVLW B'00100100' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME ;6.ADIM MOVLW B'01000010' ;AKU YE SABIT BIR SAYI YUKLENIR MOVWF PORTB ;AKUDEKI SAYI PORTB YE YUKLENIR CALL BEKLET_100MS ; 0.1Sn BEKLETME GOTO PROGRAM ;ALGORITMA TEKRARLANIR ;**************************************************************************** ; 4MHz CLOCK ICIN BEKLETME RUTINLERI ;**************************************************************************** BEKLET_100MS: DLY_100MS ;YAKLASIK 100 MILI SANIYE CLRWDT movlw D'200' movwf msb GOTO DLY1 DLY1 movlw D'168' movwf lsb DLY2 ;YAKLASIK 3 MICRO SANIYE decfsz lsb,F ;1 INS goto DLY2 ;2 INS decfsz msb,F ;1 INS goto DLY1 ;2 INS RETURN ;**************************************************************************** ; PROGRAMI SONLANDIRMAK ICIN PROGRAM SONUNA END YAZILIR ;**************************************************************************** END
Hazırlayan: Selçuk Bayrak Emeği geçen kişilere Teşekkürler
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/10/03 Etiketler: animasyon, Assembly, led uygulamaları, microchip pic projeleri, PIC16F84 örnekleri, PIC16F84A, picbasic, proteus isis
Devre çok güzel ancak bunun hex dosyasını nereden bulabilirim yardımcı olursanız sevinirim
hex dosyasında hata veriyor
Emeğinize sağlık güzel bir çalışma
Animasyonlar harika olmuş.
Devreyi kurup denemdim ama isisde simüle ettim güzel çalışıyor.
Gerekli dosyalar bu linkte.
https://320volt.com/wp-content/uploads/2008/10/pic16f84-led-isik.rar
link belirgin olmadığı için hemen göze çarpmıyor
çok teşekkürler devre çalışıyor
hocam benim bir problem var 16f84a kullanıyorum 2 adet birden birbiriyle bağlantılı iki chipin içinede aynı programı attım program isis te çalışıyor ama devrede kendi kendine komut veriyor program aşağıda
void main() {
TRISA = 0x04;
TRISB = 0xc3;
portb=0;
basla:
portb=8;
while(1){
if (porta=0x04==1)/*ortaya gider*/
PORTB=12;
else{goto basla}/*basılmadıysa başa döner*/
goto piston
piston: /*diger piston mıknatıs komutları*/
portb=12;
delay_ms(100);
while(1){
if(portb=0x03==1) /*diğer piston yerine ulastıysa bekler ve diğer harekete geçer*/
{PORTB=60;
delay_ms(3000);}
else{goto piston} /*dpiston ulasmadiysa ulaşmasını bekler*/
goto hareket1
hareket1:
PORTB=4;
if(PORTA=0X02==1)
PORTB=12;
else{goto hareket1}/*basılmadıysa başa döner*/
goto piston2
piston2:
portb=12;
delay_ms(100);
while(1){
if(portb=0x66==1) /*diğer piston yerine ulastıysa bekler ve diğer harekete geçer*/
{PORTB=60;
delay_ms(3000);}
else{goto piston2} /*dpiston ulasmadiysa ulaşmasını bekler*/
portb=60;
delay_ms(5000);
goto basla
}
}
}
}
__CONFIG _CP_OFF & _WDT_OFF & _BOREN_ON & _PWRTE_ON & _INTOSC_OSC_NOCLKOUT & _LVP_OFF & _MCLRE_OFF & _DATA_CP_OFF
LIST P=P16F628A
#INCLUDE P16F628A.INC
SAYAC1 EQU 0X20
SAYAC2 EQU 0X21
SAYAC3 EQU 0X22
ORG 0X00
GOTO BASLIYOR
BASLIYOR
CLRF PORTB
BSF STATUS,5
CLRF TRISB
MOVLW B’11111111′;
MOVWF TRISA;
BCF STATUS,5
;SOLDAN SAGA TEK TEK YAK SONDUR
RRF PORTB, 1;
MOVLW B’00000001′;SAG 1 LAMBA
MOVWF PORTB
CALL GECIKME1
CALL SWITCHTEST;
CLRF PORTB
MOVLW B’00000010′;SAG 2 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00000100′;SAG 3 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00001000′;SAG 4 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00010000′;SAG 5 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00100000′;SAG 6 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’01000000′;SAG 7 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’10000000′;SAG 8 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
;SOLDAN SAGA SIRA ILE YAK
MOVLW B’00000001′;SAG 1 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00000010′;SAG 2 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00000100′;SAG 3 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00001000′;SAG 4 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00010000′;SAG 5 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’00100000′;SAG 6 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’01000000′;SAG 7 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
MOVLW B’10000000′;SAG 8 LAMBA
MOVWF PORTB
CALL GECIKME1
CLRF PORTB
GOTO BASLIYOR
BASLANGIC2
RRF PORTA, 0;
MOVLW B’1111110′;SAG 1 LAMBA
MOVWF PORTA
CALL GECIKME1
CALL SWITCHTEST;
CLRF PORTA
MOVLW B’11111101′;SAG 2 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11111011′;SAG 3 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11110111′;SAG 4 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11101111′;SAG 5 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11011111′;SAG 6 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’10111111′;SAG 7 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’01111111′;SAG 8 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
;SOLDAN SAGA SIRA ILE YAK
MOVLW B’11111110′;SAG 1 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11111101′;SAG 2 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11111011′;SAG 3 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11110111′;SAG 4 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11101111′;SAG 5 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’11011111′;SAG 6 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’10111111′;SAG 7 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
MOVLW B’01111111′;SAG 8 LAMBA
MOVWF PORTA
CALL GECIKME1
CLRF PORTA
GOTO BASLIYOR
GOTO BASLANGIC2
SWITCHTEST
BTFSS PORTA,0
RETURN
GOTO BASLANGIC2
RETURN
GECIKME
MOVLW D’30’
MOVWF SAYAC1
DON_C MOVLW D’30’
MOVWF SAYAC2
DON_B MOVLW D’30’
MOVWF SAYAC3
DON_A DECFSZ SAYAC3,F
GOTO DON_A
DECFSZ SAYAC2,F
GOTO DON_B
DECFSZ SAYAC1,F
GOTO DON_C
RETURN
GECIKME1
MOVLW D’30’
MOVWF SAYAC1
DON_3 MOVLW D’30’
MOVWF SAYAC2
DON_2 MOVLW D’30’
MOVWF SAYAC3
DON_1 DECFSZ SAYAC3,F
GOTO DON_1
DECFSZ SAYAC2,F
GOTO DON_2
DECFSZ SAYAC1,F
GOTO DON_3
RETURN
GECIKME2
MOVLW D’40’
MOVWF SAYAC1
DON_6 MOVLW D’40’
MOVWF SAYAC2
DON_5 MOVLW D’40’
MOVWF SAYAC3
DON_4 DECFSZ SAYAC3,F
GOTO DON_4
DECFSZ SAYAC2,F
GOTO DON_5
DECFSZ SAYAC1,F
GOTO DON_6
RETURN
END
Main function is not defined yazıyor acaba hata nerede yardımcı olabilirmisiniz.
hocam lise 4e gidiyorum şu sorunun cevabını bir türlü bulamadım cevap hakkında yardımc olurmusunuz
SORU :pıc16f84a microdenetleyicisinde giriş port b çıkış port a devresinin komutları
ŞİMDİDEN TEŞEKKÜRLER…
Hocam lise 3 sınıfa gidiyorum bi sorum olucaktı pıc16f84a devresine flip flop (polis çakarı) nasïl yaptırabilirm.
ASM programını verir mısınız.
hocam bu devrenin ares çizimini nerden bulabilirim acilen lazım..
hex dosyası nerde belirtilen adres hata veriyor yardımcı olablirmisiniz?
birisi hayrına malzeme listesini yazarmiki şuruya
ya kardeşim bi hata veriyor hala cözemedim bu nasıl birsey