
Bu yazımızda otomasyon sistemlerinin en çok kullanılan ürünlerinden frekans çeviricileri ve motorlar hakkında bilgi verilecektir. Frekans çevirici diğer bir adı ile hız kontrol ünitesi, sürücüler otomasyon da kullanılan lisan itibariyle inverterler. Motor ünitesine yol aldırabilen hız ve moment kontrolü sağlayan motorun frekans ve gerilimini kontrol eden elektronik cihazlara sürücü (inverter) hız kontrol ünitesi denir.
Sürücü neden kullanılır
1) Motora veya bu özelliklerde çalışan sistemlere hız kontrolü yapmak için.
2) Motor ilk kalkınma anında normal akımından 3kat daha fazla akım çeker sürücü motora giden akımı sınırlar motorun zarar görmesini engeller.
3) Çok hassas pozisyon lamada kullanılır.
Sürücüler nerelerde kullanılır
Vinç uygulamalarında, Asansörlerde, Konveyörlerde, Yürüyen merdivenlerde, Otomobil firmalarında, Tekstil,İnşaat çoğunluk ile tüm otomasyon sistemlerinde sürücüler kullanılır.
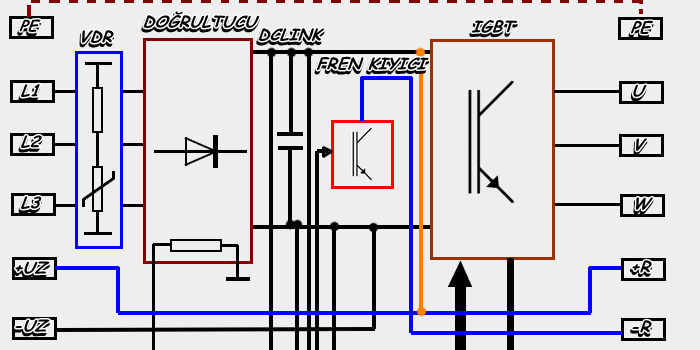
Sürücü( inverterin) blok diyagramı
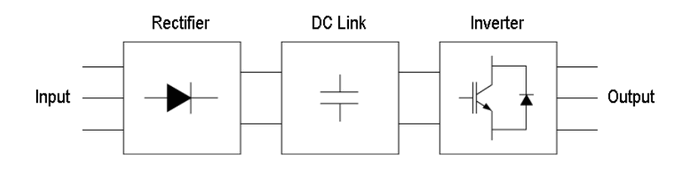
Sürücü blok diyagramı sadeleşmiş diyagramı
Sürücüler 1 faz ve 3 faz olmak üzere 2 farklı çeşitte çalışma gerilimi vardır. Yukarıdaki 3 fazlı sürücünün blok diyagramı olup sistemin işleyişine bir örnektir. Yukarda gösterilen blok diyagramın her ifadenin açıklamasını yapalım
MAINS CONNECTOR (Ana konektör ) ; Şebeke enerjisi R,S,T 3 Faz bağlantısı. Sürücü ( inverterimizi ) çalıştırmak için bu konektöre 3 Faz R,S,T bağlamalıyız. OVER VOLTAGE PROTECTION ( yüksek voltaj koruması ) ; Şebeken gelebilecek ani pik ve harmoniklerin cihaza zarar vermemesi için girişte bulunan sigorta ve VDR‘lerin oluşturduğu elektronik devredir. Sistemin daha sağlıklı çalışabilmesi için sürücülerle birlikte şok bobini Sürücü giriş ve çıkış filtrelerinin kullanılması daha uygundur.
RECTIFER ( Doğrultucu ) ; Şebekeden gelen 3 Faz 380VAC doğrultarak DC 500V enerji dönüştürür. DCLINK; Diğer bir ifadesiyle DCbara diyodun doğrultması ile üretilen 500VDC gerilimini DCbara kondansatörüne uygulanmasıdır diğer bir adı DCbara kondansatörü sürücüyü bu hat ile kendi içindeki sistemleri beslemek için kullanılır. DCLINK gerilimi ile DC gerilimdeki diğer elektronik cihazları çalıştırabilinir.
BREAK CHOPPER ( Fren kıyıcı ) ; Kondansatörün + ucundan beslemesini alır, sürücüdeki görevi motorun ani kalkma ve durmalarında DCLINK gerilimi yaklaşık 900VDC gerilime yükselir bu gerilim artması sürücüye zarar verebilir. Fren kıyıcı devresi ile fazla olan bu 400VDC gerilim kendi üzerine alır ve sistemin zarar görmesini engeller.
Genelde bu tüp durumlarda Sürücüyle birlikte firen direncide kullanılması gerekmektedir bu direnç bildiğimiz dirençler gibi değildir. Yüksek güç ve yüksek çalışma gerilimine sahiptir. OUTPUT STAGE (Çıkış katı) ; Sistemin en önemli aygıtı olup en hassas elemanıdır. Breakchopper devresi üzerinden geçen DCLINK gerilimi +Besleme gerilimini Collector pininden, – Besleme gerilimini Emiter pininden alır, Çıkış katı ( IGBT ) tarafından tekrar AC enerjiye dönüştürülür, dönüştürülen AC enerji 3 fazlı motorun U,V,W sargı uçlarına uygulanır.
Kısaca özetler isek; Sürücünün girişine 3Faz 380VAC uygulanıp köprü diyot ile DC 500V çevrilip , tekrar çıkış katın da IGBT ile 380VAC çevrilir.
IGBT Nedir ?
IGBT ; Insulated Gate Bipolar Transistör (Geyt’i yalıtılmış bipolar transistör) Bipolar transistörlerin ve metal oksit yarı iletkenli MOSFET avantajlarını birleştiren devre elemanıdır. Gate, Collector,Emiter olmak üzere 3 uçtan oluşmaktadır.
Bir devre yardımıyla açıp kapatabileceğimiz diyot gibi geyt ucu ile kontrol edebileceğimiz mosfet gibi kullanılabilinir. IGBT devreyi tetikleme açısından mosfet gibi güç iletimi açısından bipolar transistör gibi davranır. IGBT MOSFET gibi voltaj kontrollü çalışırken BJT gibi yüksek akımlarda çalışır.
IGBT elemanının sembolü
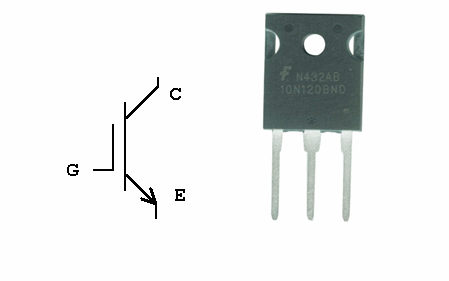
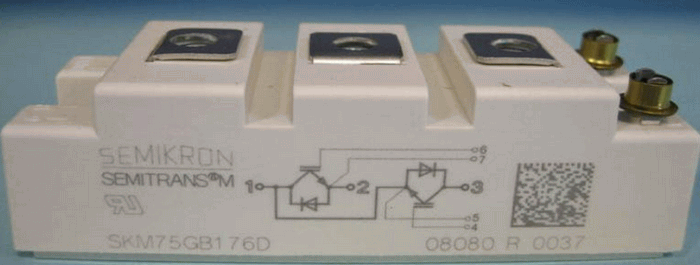
Semikron SKM75GB176D IGBT
IGBT Nasıl çalışır
IGBT diğer transistör modellerin den BJT, MOSFET gibi yapıya sahip bir elemandır. IGBT yüksek akım ve gerilim de çalışır IGBT hızlı tetikleme özelliğinden dolayı sürücü ve UPS sistemlerinde kullanılır.
Tetikleme kartından gelen palsler Geyt ucuna uygulanır. C-E akım geçişi olur dolayısıyla çok hızlı açılıp kapanabilen bir anahtar görevi görür.
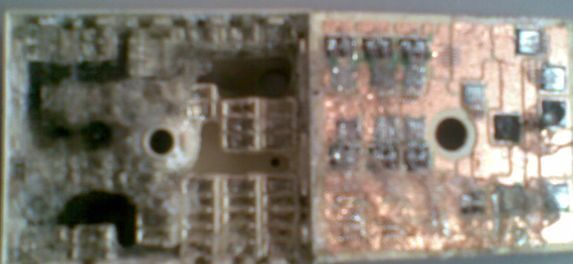
Yanmış bir IGBT; IGBT‘ ler genel olarak şu sebeplerden dolayı arızalanır; Sürücü inverter girişi nominal gerilimden fazla gerilim gelmesi sonucu IGBT C ucu zarar görmektedir. Ani gerilim yükselmesi yada düşmesi sonucu IGBT arızalanır, çıkışa bağlanan yükün çektiği akım fazla ise IGBT arızalanır örnek verecek olur isek; sistemde kullanılan motor mekanik sıkışmadan dolayı zorlanacak ve motor sürekli akım çekecek sürücünün çıkışları bu akımı uzun süre kaldıramayacak ve sonunda IGBT U,V,W pinlerinde yüksek akımdan dolayı bir arıza görülecektir ve IGBT bozulacaktır. IGBT içersinde TF (termistör) sıcaklık algılayıcı eleman vardır. Örneğin yukarıdaki IGBT 80C çalışma ortamına kadar sorunsuz çalışır, ortam
Sıcaklığı 80C geçtiği zaman TF bozulur bu durumda IGBT elemanı içersindeki elektronik kartta, TF devresinde bir patlama olacaktır buda IGBT bozacaktır. IGBT bir bozulma meydana gelirse kesinlikle tamir edilemez. IGBT komple bir modüldür.
SÜRÜCÜ (inverter) Çeşitleri
Piyasada ASENKRON ve SERVO olmak üzere 2 çeşit sürücü kullanılmaktadır. Her birinin kullanım alanı ve çalışma şekli taşıdığı görev farklıdır.
ASENKRON SÜRÜCÜ; Aşağıdaki sürücü 2 kısımdan oluşmaktadır 1.güç ünitesi IGBT yüksek gerilimin bulunduğu ünite 2. Kontrol ünitesi, çoğu sürücüde sürücü üzerinde keypad, lcd, display, kontrol paneli bulunmaktadır.
Sürücü çalışmasını, hangi ayar ve özelliklerde kullanmak istersek sürücü kontrol ünitesi üzerinden sürücünün kullanmak istediğimiz özelliklerini ayarlıyoruz. Kontrol ünitesi ile güç ünitesi birbiriyle haberleşir. Aşağıdaki sürücü ile sadece AC motolar sürülebilir hız kontrolü yapılabilinir, Servo motorlar AC sürücü ile kontrol edilemez. AC Sürücüler sadece açık çevrimde çalışır.
AC Sürücülerin çıkış uçları olan U,V,W AC Motorun sargı uçlarına istenildiği gibi bağlanabilir. Sürücülerin PC ile haberleşmesi için RS232-RS485 bağlantısı vardır. Ayrıca sürücüler birbiriyle haberleşmeleri için çeşitli haberleşme protokolleri vardır.
Bunlar; SBUS, MODBUS, INTERBUS, CANBUS, PROFIBUS sürücüler PLC üniteleriyle de haberleşebilir, internet üzerinden ağ sistemiyle de haberleşebilir.
Asenkron Sürücü
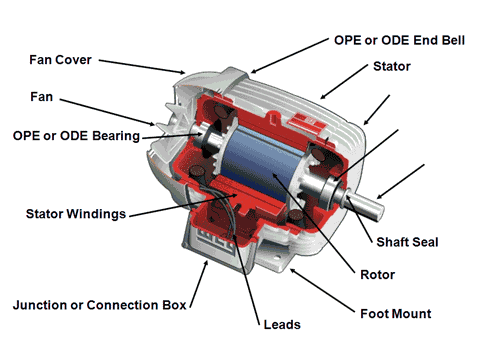
AC MOTOR; Daha kalın sargıya sahip, istenilen güçlerde yapılabilir, fan soğutmalı ve bobin sargılıdır
AC Motor Kullanım Yerleri
Vinç, Asansör,Tekstil,İnşaat,İçecek alanında kullanılır.
Açık Çevrim Nedir ?
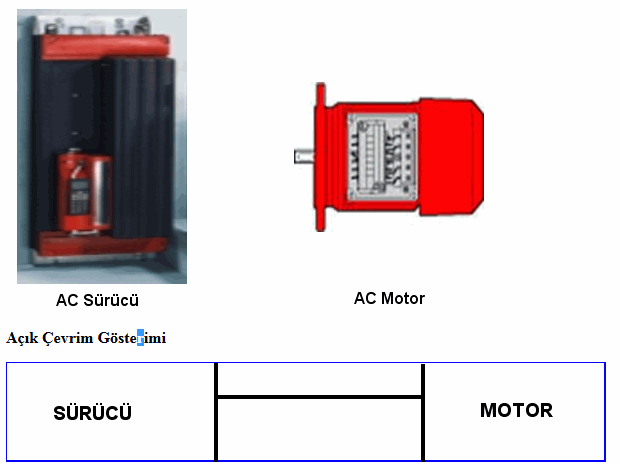
Sürücü motoru istediği şekilde sürer ama yaptığı işin doğruluğunu takip etmez örnek verecek olur isek sürücü motora 1500d/dk dönmesini istedi motor bu bilgiyi aldı ama gerçekten motor 1500d/dk dönüyor mu yoksa dönmüyor mu sürücü bu işlemi takip etmez yapılan işlemi doğru olarak kabul eder. Motora müdahale etmez.
SERVO SÜRÜCÜLER (SENKRON) ; Servo diğer bir anlamı köle demektir bu sürücü asenkron sürücüye göre daha hassas çalışma özelliğine sahip olup çok hassas pozisyon lama uygulamalarında tercih edilir. Servo sürücüleri kullanmak için mutlaka servo motor kullanılmalıdır, ya da Asenkron motora Enkoder yada Resolver geribesleme elemanı kullanılarak Servo motormuş gibi iş yaptırabilinir.
Servo Sürücü
Servo sürücüde de yine asenkron sürücüde olduğu gibi kontrol ünitesi ve güç ünitesi bulunmaktadır ve aynı şekilde servo sürücüdede kontrol paneli, lcd, display, keypad bulunmaktadır. Servo sürücülerde Servo motor kullanılmaktadır. Servo motorlarda Motor miline resolver veya enkoder ya da harici bir enkoder bağlanabilir bütün servo motorlarda bu olmak zorundadır servo motorlar kapalı çevrimde çalışır kapalı çevrimde döngüyü devam ettiren cihazlar resolver, enkoderdir.
Servo Motor
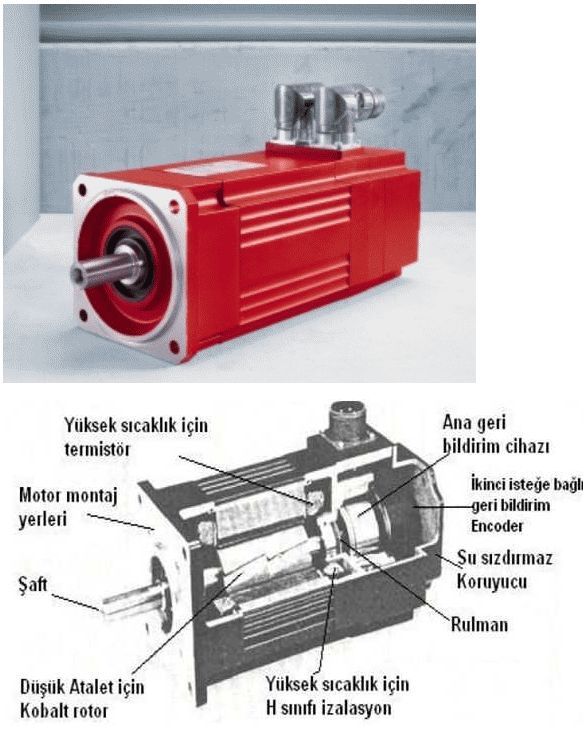
Güçleri belli bir yere kadardır, Yüzeysel soğutmalıdır, Mıknatıslı rotor ve resolveri vardır, Dinamik ve kararlı çalışır, Mıknatıs ile dönen alan sağlar, Hacmi küçüktür, Isınmaya karşı dayanaklıdır.
Servo Motor Kullanım Alanları
Robot kollarda, Eksenli uygulamalarda, Otomobil alanında kullanılır.
Kapalı Çevrim
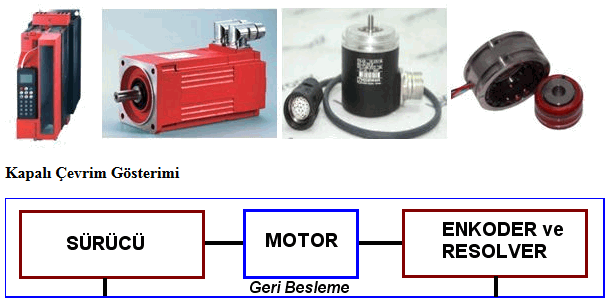
Sürücü motoru sürerken bir yandan motora bağlı olan enkoder veya resolveri de kontrol eder sürülen motor enkoder veya resolver üzerinden veri alınıp sürücüye tekrar bir geri besleme yaptırılır.
Örnek verecek olur isek; Servo sürücü motora 750d/dk dönmesini istiyor sürücü den start verildiği zaman motor dönmeye başlayacak bir yandan da servo motora bağlı resolver veya enkoder den sürücüye bilgi gidecek motor gerçekten 750d/dk dönüyor mu? Eğer bu işlemler de doğru sonuçlar çıkarsa kapalı çevrim doğru yapılmıştır, Eğer oldu ki sürücü motorun daha düşük veya daha yüksek bir devirde çalıştığını görür ise burada kapalı çevrim tam manası ile doğru yapılamamıştır, muhtemel sorun enkoder veya resolver motor milinden aldığı bilgiyi yanlış algılıyor ve sürücüye yanlış bir bilgi iletiyor .
Kapalı çevrimin olmasa olmazı enkoder ve resolver
Resolver;

RESOLVER Servo motorda kullanılan ve kapalı çevrim sisteminde kullanılan motor miline bağlanan geri besleme elemanıdır. Resolver motorun milinin iç kısmına birebir takılır motor dönmeye başladığında resolver içindeki bobinde döneceğinden dolayı motorun o andaki pozisyon ve hız bilgisini sürücüye iletir. Resolver analog olarak çalışır. Resolver bobinlerin yaptığı açıya göre çalışır. Resolver motor çalıştığı zaman dış etkilerden parazitlerden cihazın ürettiği EMC den etkilenebilir bu durum resolvere zarar verebilir resolverin zarar görmemesi için bu tip cihazları bağlamada ekranlı kablo kullanılmalıdır bu kablo iç tarafı çok telli dışında ise toprak bağlantısı yapılabilecek bir kablodur. Ekranlı kablo kullanılarak resolver EMC den etkilenmemiş olur.
Enkoder

ENKODER; Kapalı çevrim sistemin de kullanılan ve servo motorların miline bağlanan dijital bir elemandır. Enkoder dijital sistem ile çalışır, içyapısında pals sitemi vardır, içyapısında elektronik bir kart vardır algılayıcılarda oluşmaktadır. Motorun yaptığın hareketin kaç devir
ve hangi pozisyonda kaldığını sürücüye bildirir. 1024.2048.4096 pals sistemli enkoderler mevcuttur. Üstteki şekil enkoderin görünümü ve enkoderin içyapısındaki kart ve dişli sistemi. Aynı şeklide enkoderin de EMC ve diğer dış etkenlerden zarar görmemesi için Ekranlı kablo kullanılması gerekmektedir.
Enkoder ve Resolver arasındaki farklar;
1) Resolver elektrik kesildiği zaman pozisyonunu bulunduğu konumu unutur. Enkoder elektrik kesilse dahi bulunduğu konumu ve sistemdeki pozisyonunu unutmaz.
2) Resolver sin ve cos sinyaller ile çalışır. Enkoder kare dalga ile çalışır, Resolver çalışma prensibi analog , Enkoder çalışma prensibi dijitaldir.
3) Resolver parasal yönden daha ucuzdur, Enkoder daha pahalıdır.
4) Resolver motor miline bağlanır, Enkoder motor miline ve dışarıda harici olarak bir hatta bağlanabilir.
Sürücüleri Devreye Alma
İlk önce kuracağımız sistemi iyi tayin etmemiz gerekecektir kuracağımız sisteme göre sürücü ve motorların gücü değişecektir. Sürücüleri devreye alırken Şebeke giriş filtresi ve şok bobini sürücünün girişine bağlanır böylece sürücüye daha iyi bir EMC‘ siz enerji uygulanmış olur. Sürücü çıkışlarına da Şebeke çıkış filtresi ve şok bobini bağlanmalıdır sürücünün ürettiği gereksiz parazitli enerji motora zarar vermesini engellemek için çıkış şebeke şok bobini ve çıkış filtresi bağlanması gerekir. Sistemin topraklama bağlantısı iyi yapılması gerekir.
Bu durumlar göz önünde bulundurulur ise sistem daha sağlıklı çalışır, aksi takdirde yukarda anlatılanların bir ya da bir kaçı yapılmayacak olur ise sistem belli bir çalışma zamanından sonra arızaya, yada hiç kullanılmayacak özelliğe gelebilir.
Bir sonraki dergide görüşmek dileğiyle, sağlıcakla kalın. Aykut YILMAZ
PicProje E-Dergi 2 | Yazar: aykut54
Yayım tarihi: 2018/07/05 Etiketler: motor
Merhaba,
İçinde 9 adet motor ve arduino bulunan bir heykel çalışması yapmak istiyorum. Planım kısaca şudur:
3’erli yan yana 9 asansör kabini düşünün. 9 kabinin de duvarları pleksi. Yani 9 asansörün de her kabini her yönden görülebiliyor. İçinde de küçük heykelcikler var. Bu kabinlerin her biri, heykellerle birlikte yaklaşık 800 gr civarında olacak. Her kabin kimi yavaş, kimi çok yavaş (ama hiçbiri hızlı değil) aşağı yukarı hareket edecekler. Bir kabin en yukarıya çıktığında, tekrar aşağıya inmeye başlayacak ve böylece her kabin birbirinden farklı hareket ve hızlarda gidip gelecekler. Bu sistemi makaralarla yukarıya ya da aşağıya yerleştireceğim 9 motorla ve arduino ile (ya da 2 arduino ile?) kuracağım. Ayrıca her kabinde farklı renk ve şiddette led aydınlatmalar da olacak.
Size sorum, böyle bir projede hangi tür motor (360 derece servo, dc, ?) daha sağlıklı ve pratik çalışır, hangi modüller ve kaç adet (sürücüler, motor kartları, vb) gerekir ve hangi güçte bir güç kaynağına ihtiyaç duyarım? (Çalışma 220v şehir elektiriğiyle çalışacak).
Her kabin 13 x 10 x 10 cm olacak diye düşünüyorum. Tek bir kabinin 800 gr civarı olmasını hedefliyorum. Bu çalışma için motorlar, sürücü(ler), ve güç kaynağım yok, diğer malzemeler elimde var ya da kendim yapacağım. Çalışmanın yüksekliği yaklaşık 50 cm olacak. Kabinlerin sürtünmesini önlemek için kafamda birkaç düşünce var. Ama kabinlerdeki ledlere elektiriği nasıl taşıyacağım hâlâ muallakta. En kötü çözüm, taşıyıcı iplerle birlikte onları da kabine taşımak. Ama o zaman da sürekli hareketle bu kablolar ne kadar dayanır, onu bilmiyorum.
Yanıtınız için şimdiden teşekkürler.
Bu arada… aslında burası yukarıdaki metine yapılacak yorumlara ayrılmış. Ben kabalık ettim ve ilgisiz bir konuya birden girdim. Oysa metni okudum ve çok bilgilendiriciydi. Önce bunu söylemem gerekirdi. Üzgünüm.
Öte yandan, elektronik konularına yeni girmiş, ufaktan ufaktan anlamaya çalışan biriyim. Belki benim gibi sıradan vatandaşların da öğrenmek için böyle yollar denemesi gerekir. Umarım anlayışla karşılarsınız.
Merhaba, sorun değil fakat buradan yardım almanız uzun sürebilir. Foruma kayıt olup ilgili bölümde konu açabilirsiniz https://elektronikprojeler.com/
İyi çalışmalar
Ustad merhaba,
Volt: 24VDC
Output: 250W
Rated Speed : 2500rpm
Rated current: 14.0A
Bilgileri olan elektrikli motorun Kontrol ünitesinde sorun var, tamir veya yenisi konusunda desteğiniz olabilirmi
https://ibb.co/LZsBz0V
https://ibb.co/fFDXjTH
https://ibb.co/GVR7s9C
https://ibb.co/2KxkNZL