

Hazırlayan: Tansel Kaya Böyle bir çalışmanın yapılmasındaki temel etken bu alandaki malzemenin Türkçe olarak bulunmasının zorluğu olmuştur Ölçme problemleri ve algılayıcı çözümleri üzerinde durarak günümüzde geçerli olan robot araştırmaları çerçevisinde ölçümlerin ardında yatan prensiplerin belirlenmesi hedefi güdülmüştür. Aşağıda yer alacak materyal son derece sınırlı olup geliitirilmeye açıktır. Belirtilen refereansları dahil etmeniz koşulu ile bu metinde yer alan tüm malzemeleri birebir veya kısmen kullanabilirsiniz.
Duyular
Ölçüm ve Ölçerler
Algılayıcılar
Çalışma Prensipleri
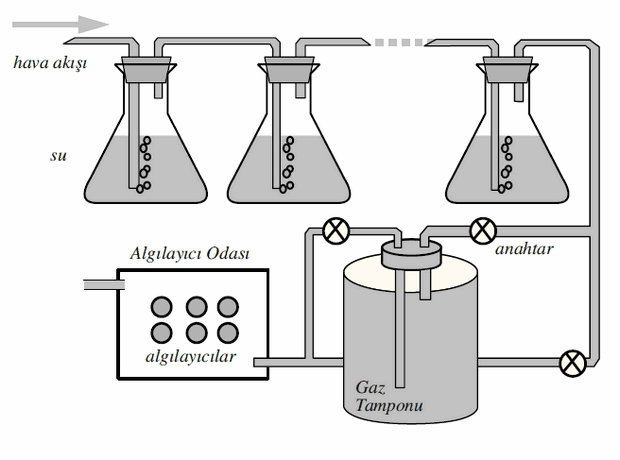
Koku Algılayıcıları
Dokunma ve Basınç Algılayıcıları
Basınç Algılayıcıları
Dokunma Algılayıcıları
Dokunma Ekranları
Anahtarlar
Bükülme Algılayıcıları
Ses Temelli Mesafe Algılayıcıları
Ultrason Temelli Mesafe Ölçümleri
Ultrason Görüntüleri
Temel Yön Bulma Sistemleri
Dünya Yer Bulma Sistemleri (GPS)
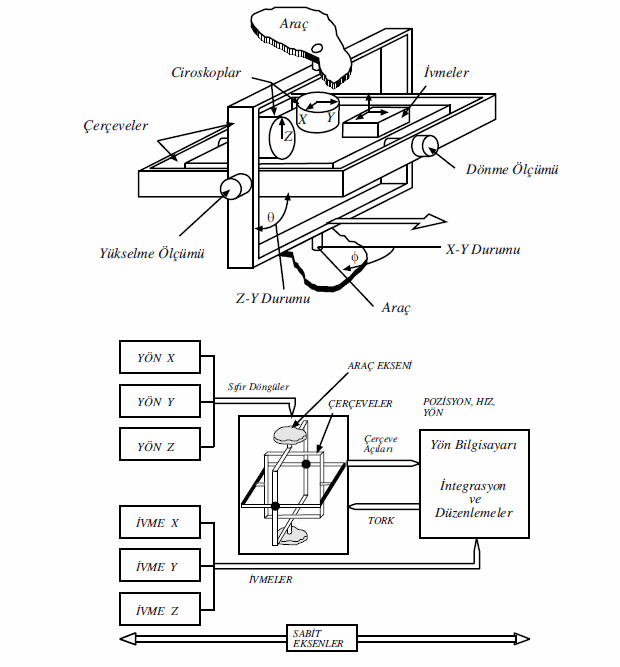
Atalet Algısı
Integral alınması
Örnek Kütleler
Ciroskoplar,Lazerler
Görüntü Algılayıcılar ve Işık Algılayıcıları
Polarize Işık Algılayıcıları
Yansımaya Dayalı Optik Algılayıcılar
Dönüş Sayaçları
Dik Şaft Ölçümleri
Kızıl Ötesi Algılayıcılar
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/04/20 Etiketler: algılama, ciroskoplar, hall sensör, mesafe ölçümü, robot projeleri robotlar, robot sensör, robot yapımı, sensör, sensörler, seviye ölçümü