
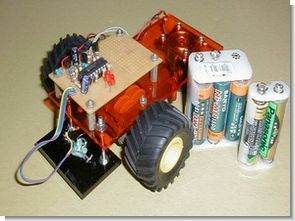
Robot devresi üzerinde fazla malzeme yok basit bir yerleşim var hazır bir oyuncak arabanın mekanik kısmı kullanılmış motor fazla güç çekmediği için iki adet 2sc2001 transistör ile sürülmüş kontrol ünitesi pic16f84 üzerine kurulu
A line tracer is a line that runs on a line drawn in black (7 m / m wide) by illuminating it with infrared rays, etc., and controlling the left and right motors.
This time, we used a 3-volt wheat ball instead of infrared rays to illuminate the line, shining ordinary light, and using a CDS with a diameter of 5 m / m (in Akizuki) for the sensor.When the CDS hits the line, it sends an OFF signal, and when it goes off the line, it sends an ON signal to RA1 and RA2 of PIC port A, and controls RB4 and RB6 of port B to turn on the motor of the twin motor gearbox (TAMIYA). It turns off. The LED indicates the status.
The software is very ordinary, but RB0 on port B has an external interrupt. When an interrupt occurs, the motor stops temporarily (about 30 seconds), and the LEDs blink alternately to indicate that the interrupt operation has started. Also, the oscillating sound signal is output from RB7 of port B. These are not wired, but half of the board is a circled dot board, so you can experiment with your favorite circuits later. For example, interrupting with voice or light.




HEX dosyası için derleme yaparken yapılandırma aşağıda ki gibi olacak
.OSC RC; Osilatör tipi: RC
PWRT ON; Power-up timer: ON
.WDT OFF; Watchdog timer: OFF
.PROTECT OFF; Kod koruması: KAPALI
Takip Eden Robot Assembly Kaynak Kodu
LIST P=16F84,R=DEC INTCON EQU H'B' STATUS EQU 3 PG EQU 5 PORTB EQU 6 PORTA EQU 5 TRISA EQU H'85' TRISB EQU H'86' PORTA_IN EQU H'11' WORK_REG EQU H'12' WORK_STATE EQU H'13' COUNTER EQU H'14' COUNTER2 EQU H'15' COUNTER3 EQU H'16' COUNTER4 EQU H'17' ;********************************** ORG 0 GOTO START ORG 4 GOTO INT ;********************************** ; ;*********************************** START BSF STATUS,PG MOVLW B'00110' MOVWF TRISA MOVLW B'00000001' MOVWF TRISB BCF STATUS,PG MOVLW B'10010000' MOVWF INTCON CLRF PORTB ;************************************ ; ;************************************ MAIN MOVF PORTA,0 MOVWF PORTA_IN MOVLW B'00110' ANDWF PORTA_IN,1 MOVLW B'00000' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO STR MOVLW B'00010' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO RSTP MOVLW B'00100' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO LSTP MOVLW B'00110' SUBWF PORTA_IN,0 BTFSC STATUS,2 GOTO STP GOTO MAIN ;************************************** ; ;************************************** STR MOVLW B'01011010' MOVWF PORTB GOTO MAIN RSTP MOVLW B'00011000' MOVWF PORTB GOTO MAIN LSTP MOVLW B'01000010' MOVWF PORTB GOTO MAIN STP MOVLW B'00000000' MOVWF PORTB GOTO MAIN ;**************************************** ; Interrupt processing ;***************************************** INT MOVWF WORK_REG SWAPF STATUS,W MOVWF WORK_STATE BCF INTCON,1 CALL SAB_TAIM SWAPF WORK_STATE,W MOVWF STATUS SWAPF WORK_REG,F SWAPF WORK_REG,W RETFIE ;****************************************** ; Interrupt subroutine ;****************************************** SAB_TAIM CLRF PORTB MOVLW 20 MOVWF COUNTER2 LOOP BSF PORTB,1 MOVLW 150 MOVWF COUNTER3 DLY1 BSF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 BCF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 DECFSZ COUNTER3,1 GOTO DLY1 BCF PORTB,1 BSF PORTB,3 MOVLW 150 MOVWF COUNTER4 DLY2 BSF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 BCF PORTB,7 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 GOTO $+1 DECFSZ COUNTER4,1 GOTO DLY2 BCF PORTB,3 DECFSZ COUNTER2,1 GOTO LOOP RETURN ;******************************************* END ;*******************************************
Kaynak site: web1.incl.ne.jp/nisimo/rain.html
Yayım tarihi: 2009/01/23 Etiketler: çizgi izleyen robot, çizgi takip, microchip pic projeleri, motor, oyuncak araba, PIC16F84 örnekleri, robot projeleri robotlar, robot yapımı
Yaptığınız site harika olmuş ben 21 yaşında bir gençim 8 senedir bu işin içerisindeyim baya bir meraklıyım elektronige bu güzel bilgileri paylaştığınız için teşekür ederim inşallah bundan daha büyük sitelerede imza atarsınız
yaptıgınız işler çok güzel paylaşımlar harika fakat ben eksik kaldım bende yapabilmek istiyorum bunları ve diğer yapmak isteyen arkadaşlarda vardır mutlaka bu projelerin devre şeması gerekli malzemeler vs. yazılı olsa güzel olan iş dahada güzel hale gelmiş olurdu heralde saygılarr paylaşımlar süper
Küçük resimlerin üstündeki “PIC16F84 Tracer line” yazısına tıkladığınızda projenin bulunduğu sayfaya ulaşabilirsiniz açılan sayfada en alt bölümde “Wiring line tracer” yazısına tıkladığınızda şema görünecek sanırım görmediniz şemayı da ekledim iyi çalışmalar
eline sağlık
Paylasım ıcın teşekkürler… Bende bunu arıyordum.. 🙂
bahri eger işin en başındaysan sana http://www.antrak ” tavsiye edebilirim orası yeni başlayanlar için çok süper bir ışıgı yakıp söndürmekten başlamışlar hem şema hem program veriliyor ve çok ayrıntılı bir şekilde anlatılıyor kolay gelsin