

Sanırım step motor hakkında en sade anlatımlardan biri ayrıca kolay anlaşılır uygulama örnekleride bulunan faydalı bir makale..
Step motor fırçasız elektrik motorlarıdır. Step motorlar ile tam bir tur dönmeyi yüksek sayıda adımlara bölebilmek mümkündür (200 adım). Step motorları sürmek için, sürekli gerilim uygulamak yerine darbeler (pulse) uygulamak gerekmektedir. 12 volt ile çalısan modelleri yaygındır.
Step motorlar genel olarak 2 çeşide ayrılabilir.
1. Bipolar Step Motor
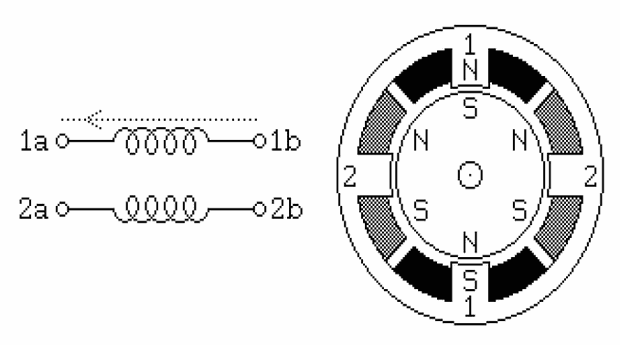
Bipolar step motorların çıkışında 4 kablo bulunur. Motorun bobinleri birbirlerine bağlanmıştır, bu yüzden bu uçlara ters gerilim uygulanmak zorundadır (1a=1 ise 1b=0 olmalıdır). Genel olarak bir H-Bridge devresi ile sürülür.
2. Unipolar Step Motor
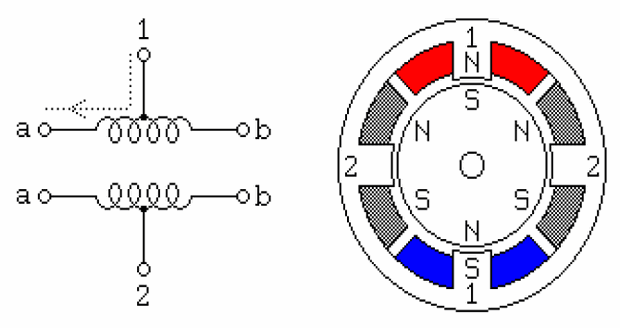
Unipolar step motorların çıkışında 5 yada 6 kablo bulunur. Motorun bobinleri ayrı ayrı çıkışa gönderilir ve yapısına göre 1 veya 2 adet ortak giriş bulunur (toprak ve besleme uçları). Yanda ki şekilde görünen step motorda 1 ve 2 ortak girişler, a ve b ise step motorun hareketinin sağlanması için gerekli kombinasyonun uygulandıgı girişlerdir.
Step Motor Sürme Teknikleri
Step motorlar, sürüş bilgisinin gönderildigi bir sistem (bilgisayar, mikrokontrolör, PLC gibi) ile bu bilgiyi step motora uygulayabilecek sürücü devreler ile sürülebilir.
L297 kullanımı: Step motor sürülürken genel olarak L298 H-bridge entegresi ile birlikte kullanılırlar.
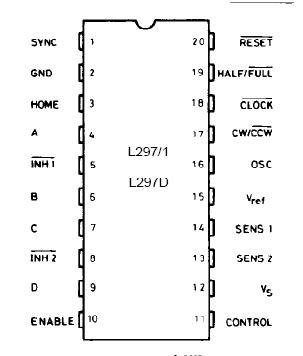
SYNC bacağı, yani birde fazla L297 senkron olarak kullanılacaksa, bu bacaklar vasıtası ile L297 ler birbirlerine bağlanır.
A,B,C ve D bacakları step motora baglanır.
Home bacagı ilk konumu belirtir (1010).
INH1 ve INH2 L298 e baglanır.
Vs entegrenin beslemesidir, 5V a baglanır.
Sense-1 ve 2 bacaklarından akım kontrolü yapılır.
Vref bacagına uygulanan gerilim referans gerilimi belirler, ve tepe değer bu gerilim olur.
CW/CCW bacagına uygulanan sinyal dönüs yönünü belirler.
Half/full bacagına gönderilen sinyal ile step motorun tam adım yada yarım adım döneceğini belirler.
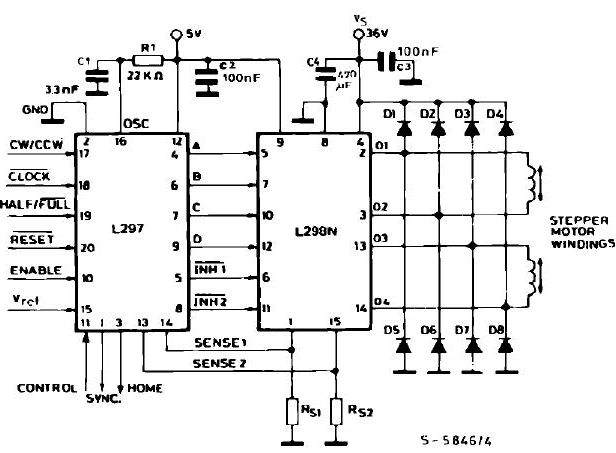
L297 – L298 birlikte kullanımı:
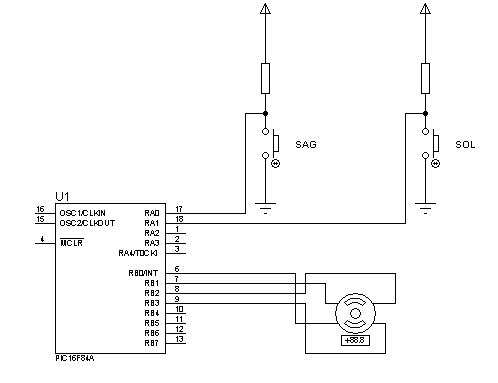
PIC16F84 ile step motor sürülmesi: Proteus programında kurulan devrenin şeması aşağıda ki gibidir. Bu devrede A portunun sıfırıncı biti 0 yapıldıgında motor sağ yönde, birinci biti sıfır yapıldığında ise motor sol yönde dönmektedir. PIC programı assembly dilinde yazılmıstır.
Program ;
LIST P=16F84 ; PIC16F84 u tanit INCLUDE "P16F84.INC" SAYAC1 EQU h'0C' ;adres tanimlamalari SAYAC2 EQU h'0D' ADIM EQU h'0E' CLRF PORTB ;portB yi temizle BSF STATUS, 5 ;bank1 CLRF TRISB ;portB yi cikis yap MOVLW h'FF' MOVWF TRISA ;portA yi giris yap BCF STATUS, 5 ;bank0 MOVLW h'FF' ; W=FF(11111111) MOVWF ADIM ;adim=W KONTROL BTFSC PORTA, 0 ;portA nin 0. bitini test et, sifirsa bir satir atla GOTO TEST_PORTA_1 SAG INCF ADIM, F ;Adim=Adim+1 MOVF ADIM, W ;W= Adim ANDLW b'00000111' ;W 00000111 ile AND CALL TABLO ANDLW b'00001111' ;son 4 bit kullanilacak MOVWF PORTB ;portB ye gonder CALL GECIKME GOTO KONTROL SOL DECF ADIM, F ;adim= adim-1 MOVF ADIM, W ANDLW b'00000111' CALL TABLO ANDLW b'00001111' MOVWF PORTB CALL GECIKME GOTO KONTROL TABLO ADDWF PCL, F RETLW b'0001' RETLW b'1001' RETLW b'1000' RETLW b'1010' RETLW b'0010' RETLW b'0110' RETLW b'0100' RETLW b'0101' GECIKME MOVLW h'FF' MOVWF SAYAC1 DONGU1 MOVLW h'FF' MOVWF SAYAC2 DONGU2 DECFSZ SAYAC2, F GOTO DONGU2 DECFSZ SAYAC1, F GOTO DONGU1 RETURN TEST_PORTA_1 BTFSC PORTA, 1 GOTO KONTROL GOTO SOL END
ULN2003 Kullanımı:
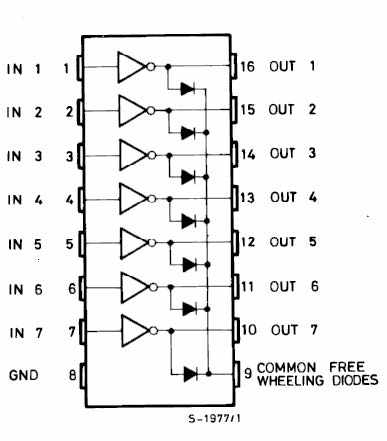
ULN2003 Step motor sürmek için kullanılan yardımcı bir entegredir. Yandaki sekilde ULN2003 ün bacak bağlantıları görülmektedir.
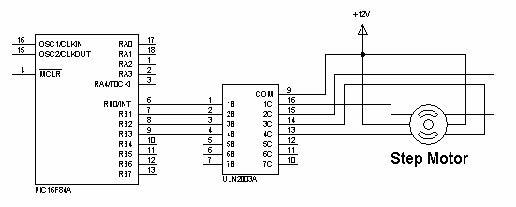
Asagıdaki sekilde ULN2003 ün PIC16F84 ile kullanılmasına bir örnektir.
Kaynak: İstanbul Teknik Üniversitesi IEEE Ögrenci Kolu – Emeği geçen hazırlayan kişilere teşekkürler
Yayım tarihi: 2014/09/15 Etiketler: L297, L298, motor sürücü, motor sürücü devresi, step motor, step motor kullanımı, step motor sürme
Öncelikle çok başarılı bir çalışma olmuş.sormak istediğim tek soru var PİC16F84 ile yapılacak olan devrede birde hız kontrolü istenirse ne yapmak gerekli?