Mersin üniversitesine ait ders notları Hazırlayanlar : ÖĞR. GÖR. Mehmet YILMAZ ÖĞR. GÖR. İbrahim KAYA “Servo senkro mekanizmalar otomatik kontrol” konusunda çok detaylı bilgiler bulunmakta – Emeği geçen kişilere teşekkürler.

Elektrik mühendisliği açısından bakıldığında büyüklükler, elektriksel büyüklükler (akım , gerilim , direnç ) ve elektriksel olmayan büyüklükler olarak iki grupta toplanabilir. Bu büyüklükler üzerinde bir işlem yapmak ya da bir kontrol değişkeni olarak kullanabilmek için ölçülmeleri şarttır. Elektriksel olmayan büyüklükler çoğu zaman elektriksel büyüklüklere dönüştürülerek ölçülür.
Elektriksel olmayan büyüklükleri elektriksel biçime dönüştürmek için dönüştürücülere ihtiyaç vardır. Enerjiyi bir biçimden başka bir biçime dönüştüren elemanlara dönüştürücü denir. Başka bir deyişle dönüştürücü ( transdcuser ) , bir çeşit sezici eleman yada cihazdır.
Fiziksel veya kimyasal büyüklükleri elektrik , pünomatik , ya da hidrolik çıkışlara dönüştürür. Kullanım biçimine bağlı olarak , dönüştürücüler genel olarak elektriksel ve mekaniksel dönüştürücüler olarak iki gruba ayırabiliriz. Elektriksel etkiyle çalışan dönüştürücüler , girişlerine mekanik, kimyasal, ısı, elektro mekanik vb. formlarda giriş yapılabilen ve bu formdaki giriş değişkenlerine orantılı olarak elektriksel çıkış verirler.
Bu dersimizde sensör yerine duyarlık elemanları veya sezici elemanlar gibi
deyimler kullanılacaktır. Kontrol edilecek ya da ölçülecek fiziksel büyüklükleri sezen ve elektriksel forma dönüştüren çok sayıda dönüştürücüler mevcuttur. Bunlardan bazıları ;
- 1) Pozisyon duyarlık elemanları
- 2) Foto elektrik elemanlar
- 3) Manyetik duyarlık elemanları
- 4) Endüktif duyarlık elemanları
- 5) Kapasitif duyarlık elemanları
- 6) Diğer duyarlık elemanları
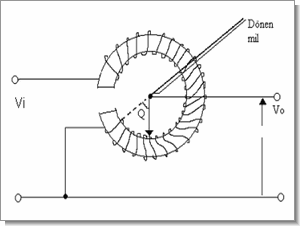
Endüktif potansiyometreler toroid-sargılı oto trafosu biçimde olup alternatif akım için tasarlanmıştır. Şekilde endüktif potansiyometre görülmektedir. Potansiyometrenin nüvesi, manyetik geçirgenliği yüksek olan metallerden yapılmış olup sargılar üzerinde hareket eden kontak kömürden yapılmıştır. Bu tip potansiyometrelerin dirençli potansiyometrelere nazaran daha uzun ömürlü oldukları bilinmektedir.

Üzerine düşen ışık enerjisi ile iletkenliği değişen ya da ışık enerjisini , elektrik enerjisine dönüştüren elektronik devre elemanlarıdır.
Işığın Temel Özellikleri:
a) Güneşten dünyamıza yayılan Işık, elektromanyetik bir yayılımdır. Dalga boyları ile belirtilir. Kırmızı ile mor arasında kalan dalga boyları insan gözüyle görülebilir. Kızıl ötesi veya mor ötesi ışınlar çıplak gözle görünmez.
b) Işığın hızı 300.000 km/sn olarak bilinmektedir. Ancak Havasız, havalı, cam ve su gibi ortamlarda, değişik hızlarda ve dalga biçiminde yayılır.
c) Işık dalgası, foton denen, minik enerji paketlerinden oluşur. Her rengin dalga boyları farklıdır. Örneğin mor ötesi ışığın dalga boyu 400 nanometrenin altındadır. Kızıl ötesi ışığınki ise 750 nanometrenin üzerinde yer alır. Dalga boyu λ ( lamda ) ile gösterilir. Birimi metredir. Bir saykılın mesafe olarak ifadesidir. Dalga boyu arrtıkça frekans düşer, azaldıkça frekans yükselir. Frekanla ters orantılıdır. Mor renk, kırmızı renge göre yüksek frekeanslı ışındır.
FOTO-VOLTAİK-PİL-(SOLARSEL )
Güneş pili olarak bilinmektedir. Üzerine düşen ışık enerjisini, elektrik enerjisine dönüştüren bir DC üreteçtir. Metal taban üzerine yerleştirilmiş P-N yarıiletken bileşimidir. Üstte metal yüzük yer alır. Hücre, bağlantı terminalleri dışanda kalacak şekilde, pencereli bir mahfaza içine yerleştirilir.
Günümüzde üzerinde çok çalışmalar yapılmaktadır. Işıkla çalışan hesap makinalarında
kullanılmaktadır. Henüz pahalı teknoloji olduğundan ev ve iş yerlerinde kullanılması
yaygınlaşamamıştır. Yakın gelecekte binaların ışık gören kısımlarına güneş panelleri konularak güneş enerjisinden elektrik enerjisi üretilerek kullanılması yaygınlaşacaktır. Çoğunlukla aşağıdaki sembollerle ifade edilir

Çalışması, bir ışık hüzmesi, saydam cam pencere yoluyla foto voltaik pilin, ışığa duyarlı P tabakasına geldiğinde, P-N birleşim bölgesinde, elektron hareketi başlar. Bu elektron hareketi sonucunda -şarjh elektronlar ve +şarjlı delikler oluşur. Elektronlar N tabakada, delikler ise P tabakada toplanır. Böylece, N tabakaya bağlı harici bağlantı terminali negatif, P tabakaya bağlı harici bağlantı terminal ide pozitif olmak üzere bir DC üreteç oluşur. Işık yoğunluğu arttıkça, yeni elektro-delik çiftleri oluşarak, üretecin potansiyeli artar.
Elde edilebilecek en büyük voltaj, doğal olarak, yalnız ışık şiddetine değil,aynı zamanda hücrenin boyutlarına da bağlıdır. başka bir deyişle, belli bir foto voltaik pil’den ışık şiddetini arttırarak, istenildiği büyüklükte voltaj elde edilemez. Foto piller, seri bağlanarak voltaj, paralel bağlanarak akım artırılabilir.
FOTOSEL-(PHOTOCONDUCTİVE CELL)
Üzerine düşen ışığın yoğunluğuna göre direnci değişen bir elemandır. Direnç, üzerine düşen ışıkla ters orantılı olarak değişir. LDR olarak ‘ da bilinmektedir. Çoğunlukla aşağıdaki sembollerle ifade edilir.

Yapısı: cam veya seramikten yapılmış, yalıtkan taban üzerine, ince bir tabaka halinde, bakır katkılı, kadmiyum sülfid, kadmiyum selenid veya kurşun sülfid gibi ışığa duyarlı maddelerden yapılmış bir tabaka yerleştirilir.
En üstte ise, aralarında kıvnk bir açıklık kalacak şekilde iki metal plaka yerleştirilir. Elektrot olarak tanımlanan her bir plakaya, iki çubuk lehimlenerek Fotosel’in harici bağlantı uçlan oluşturulur.
Işık, cam pencere yoluyla, kıvrık kanaldan geçerek, ışığa duyarlı tabakaya ulaşır. işlevi: Fotosel’in iki yöndeki direncide aynıdır. Bu bakımdan, hem alternatif akımda hem de doğru
akım da kullanılabilir, direnci, tam karanlıkta MΩ! lar mertebesinde, tam aydınlıkta ise100 Ω mertebesine kadar düşmektedir. Işık kontrollü devrelerde kullanılır.( Işık dedektörü gibi )
KARŞILIKLI-FOTOSEL
Biri ışık verici diğeri ışık algılayıcı olmak üzere iki eyrı birimden oluşmaktadır. Verici birimden çıkan ışık, alıcı birim tarafından sürekli gözlenir.. Aralarına bir cisim girdiğinde ışık kesilir ve ışığa duyarlı olan diğer elemanda bir değişim olur. Bu değişimi çıkış olarak nitelendirilir. Başka bir elektronik devre bu değişimi kullanarak gerekli işlemi yapar. Bu çıkış bazen bir sayıcıyı tetikleyen pals şeklinde olabilir.
REFLEKTÖRLÜ-FOTOSEL
Tek üniteden oluşur. Yani verici ışık kaynağı ile ışığa duyarlı eleman aynı birim üzerinde olup, karşıdan ışığı yansıtacak bir yansıtıcı (reflektör ) vardır. Tek tarafa elektriksel bağlantı yapıldığından montajı daha kolay ve ucuzdur. Ancak ışığı iyi yansıtan malzemelerden yansıyan ışık tarafından yanılmalar olabilir.
CİSİMDEN-YANSIMALI-FOTOSEL
Bu tip fotosel de reflektör bulunmaz. Işık cisimden yansır. Cismin yüzey rengi önemlidir. Siyah renkli cisimleri algılamak çok güçtür.
FİBER-OPTİKLİ-FOTOSEL
Alıcı ve verici yine aynı birim içindedir. Fiber optik kablo ile ışık taşınabilir olduğundan fotoselin algılama yaptığı yer ile bulunduğu yerler farklı olabilir. Montaj zorluğu olan yerler de tercih edilir.
RENK-SEÇİCİ-FOTOSEL
Cisimden yansımalı fotosel gibi çalışır. Siyah ile beyaz arasında 15 değişik değeri algılama yeteneğine sahiptir. Ambalaj kağıdı üzerindeki renk işaretlerini algılamak gibi işlemlerde gereklidir. Her rengin sinyal karşılığı farklıdır, bu farktan dolayı renkler ayırt edilebilir. Renk algılayan fotoseller ayarlanırken, önce algılanması istenen rengin üzerine getirilerek çıkış seviyesi belirlenir.
LÜMİNİSANS-SEÇİCİ-FOTOSELLER
Bu tip fotoselin diğerlerinden farkı ultra violet ışık kaynağı kullanmasıdır. Bu ışın luninisans maddeli cisimden geri yansır. Luminisans seçici fotoselin alıcı ünitesi bu geri yansımayı alıp çıkış devresini tetikler. Luminisans seçici fotosel özellikle daha geniş algılama mesafesi sağlar.
MANYETİK-SENSÖRLER
Bir transformatör de spir başına meydana gelen emk sabittir. Ancak sargıları etkileyen manyetik alan şiddeti, değiştirilerek spir başına volt sabiti değiştirilebilir. Aşağıdaki şekli inceleyiniz. Primer sargıya A.C. giriş uygulandığında, aynı yönlü ve eşit sarımlı sekonder sargılarda eşit miktarda emk oluşur. Sekonder sargılar şekildeki gibi birbiriyle aynı polaritede olan uçlar şekildeki gibi seri bağlanacak olursa çıkıştan alınacak olan gerilim sıfır volt olur.

Bobinin içindeki nüve hareketli olup pozisyonu ayarlanmak istenen ve sistemin hareketini nüveye aktaran bir mekanizmayla irtibatlandırılır. Hareketi sistemin istenen pozisyonuna göre set edilir. Eğer sistemin pozisyonunda bir değişme olursa ortadaki hareketli nüve aşağı-yukarı hareket edecektir. Bu hareketin sonucunda b sargısının etkilendiği manyetik akı da değişecektir. Örneğin hareket yukarı doğru ise, b sargısındaki gerilim azalacaktır. a sargısında meydana gelen emk aynı kaldığından çıkış sıfırdan farklı bir değer olacaktır.
Çıkışta bir gerilimin olması pozisyonun bozulduğu anlamını taşımaktadır. Diğer bir deyişle hata sinyali üretilecektir. Bu hata sinyali, kontrol elemanı tarafından değerlendirilerek sürücü devrenin hatayı düzeltmesi için enerji akışını değiştirecektir.
ENDÜKTİF-YAKLAŞIM-SENSÖRLERİ
Metal cisimlerin varlıklarını ya da geçişlerinin algılanması için kullanılır. Diğer bir ifade ile İletken malzemelerin temassız algılanması için kullanılır. yüksek anahtarlama frekansı gerektiren uygulamalarda kullanılır.
Plastik ya da metal kılıf içine alınmış olup değişik çaplarda olanları vardır. Algılama mesafeleri, bağlantı tipi ve besleme voltajların göre değişik tipleri vardır. Endüktif sensörlerin içerisinde bobin , bobini besleyen bir osilatör bulunur. Osilatör bobin üzerinden sensörün ön yüzeyine yayılacak bir manyetik alan üretir.
Eğer bu alana manyetik bir cisim girerse, Eddy akımları bu metal üzerinde dolaşır. Metal
cisim sensöre yaklaştıkça bu akımın değeri artar ve osilatörü durdurur. Osilatörün durması sonucunda çıkış durum değiştirir. İçersinde ya transistö ya da tristör bulunur. Durum değişmesi ile iletimde olan eleman kesime gider.
Mekanik anahtarlara göre ömrü daha uzundur. Anahtarlama frekansı yüksektir. Ortam koşullarından fazla etkilenmez. Algılanacak cisme dokunmaksızın algılama yapar. Plastik veya cam arkasından metalin algılanması gibi üstün özellikleri vardır.
Endüktif sensör seçerken aşağıdaki özellikler dikkate alınmalıdır.
1) Sensörün tipi : silindirik , kompakt , U kesit, varikont veya yüzük tip gibi değişik tipleri mevcuttur. Kullanılacağı yer dikkate alınarak seçilmelidir.
2) Algılama mesafesi: Endüktif yaklaşım sensörünün algılama mesafesi içindeki bobinin boyutu ile orantılıdır. Ancak algılanması istene cismin büyüklüğü, metalin cinsi,ortam sıcaklığı gibi diğer faktörlere de bağlıdır.
3) Elektriksel çıkış: kontak durumları normalde açık ya da kapalı olması ve kontak akımı dikkate alınmalıdır.
4) Anahtarlama frekansı: Kontağın bir konum değiştirmesi 1 hz olarak düşünülürse saniye de kaç kez açılıp kapanağı göz önüne alınarak anahtarlama frekansı tesbit edilebilir.
5) Özel koşullar: Patlama tehlikesi olan yerler gibi .
Kullanıldığı alanlar: robotik sistemler, konvayörler, malzeme syma, asansör seviye kontrol, kapı açma/kapama, metalik malzeme algılama , metalik malzeme sayma,hız algılama, … gibi alanlarda kullanılır.
KAPASİTİF-YAKLAŞIM-DEDEKTÖRLERİ
Anlatılan özelliklerde biriyle iletkenliğe bağlı olmadan tahta, cam,plastik ve deri gibi malzemelerin ya da akıcı ve taneli yapıdaki malzemelerin temassız algılanması için kullanılırlar. Plastik ya da metal kılıflar içerisinde bulunurlar. Farklı çaplarda silindirik veya kompakt olanları vardır.
ISI-SENSÖRLERİ
Isınma ile metallerin atomik yapılarındaki elektron hareketlerinde değişmeler olur. İki farklı metalin atomik yapıları farklı olacağından, bu metaller bir noktadan birleştirilirse bu iki metal parçası arasında mili volt mertebesinde bir gerilim oluşur. Ancak bir süre sonra arasındaki bu potansiyel farkı ortadan kalkar.
Bu iki farklı metalin birleşme yüzeyi ısıtılacak olursa aradaki meydana gelen potansiyel farkı
ısınma ile doğru olarak artacaktır.Bu şekilde iki farklı metalin birleştirilerek ısı enerjisini elektrik enerjisine dönüştürme işlemi endüstri de 1700 C0 dereceye kadar sıcaklıkların ölçülmesinde kullanılmaktadır. Bu iki eleman, termik çift ya da termokupl olarak adlandırılmaktadır.
Bİ-METAL-ÇİFT
Sıcaklıkla, metallerin boyları değişir, boyunda uzama meydana gelir. Ancak bu değişim metalden metale değişmektedir. Sıcaklıkla uzama katsayıları birbirinden çok farklı iki metal çubuk birbirine sıkıca tespit edilirse bi-metal çift elde edilir. Sıcaklık arttığında uzama katsayısı düşük olan metal tarafına bükülme olur.
Bu bükülme hareketinden yararlanılarak kontroller sağlanabilmektedir. Termik rölelerin
çalışması, termostatların çalışması, termik sigortaların çalışmasında etken eleman bimetaldir.
Isınma ile bükülen bi-metalin hareketi bir mekanik düzeneği tetikleyerek kullanılmaktadır. Ya da elde edilen hareket bir kontağın açılıp kapanmasını sağlayacak şekilde düzenlenerek bir devrenin çalışıp durmasını sağlamaktadır .
BASINÇ-SENSÖRLERİ
Basınç, birim yüzeye uygulanan kuvvettir. Üzerine uygulanan basınçla orantılı olarak elektriksel sinyaller üreten kristaller mevcuttur. Elektronikte çok kullanılan kuartz veya baryum titanit gibi piezo-elektrik kristaller kendilerine uygulanan kuvvet ile orantılı olarak bir gerilim yaratırlar. Akış hızı, hız, statik basınç ve sıvı seviyesi gibi ölçümlerde kullanılır.
NEM-SENSÖRLERİ
Ortamdaki nem miktarına bağlı olarak, nemin artması ile gerilen veya şişen, azalması ile gevşeyen veya büzülen organik maddelerden nem sensörleri yapılmaktadır. İnsan saçı neme çok duyarlıdır. Nem miktarına göre gerilen veya esneyen insan saçının bu özelliğinden faydalanılarak nem sensörleri yapılabilmektedir. Ancak saç telinin iyi seçilmesi gereklidir.
Naylon da aynı özelliğe sahiptir. Naylon sentetik bir madde olduğundan imalatı kontrol altında tutulabilir. Hassasiyetleri daha yüksek duruma getirilebilir.
Senkrolar aslında yapı itibari ile motora benzerler. Çalışması ise transformatör Dönen transformatör olara da düşünülebilir. Bundan dolayı bazen bir motor gibi bazen de trafo gibi anlatılmaktadır. Prensip olarak bir elektrik motoru şeklinde tasarlanmış elemanlardır. Stator ve rotordan meydana gelmiştir. Stator sargısı, 120 derecelik faz farkı ile sarılmış üç sargıdan meydana gelmiştir. Rotor sargısı ise iki kutupludur. Statorun içinde hareket edecek şekilde yerleştirilmiştir.
Senkronlar, daha çok hata belirlemede ve veri transferinde kullanılır. Yapım ve fonksiyonlarına göre üç ana gruba ayrılabilir.
- 1) Senkro vericiler
- 2) Senkro alıcılar
- 3) Senkro kontrol transformatörü
Senkro verici; Bu ünitede rotorun açısal konumuna göre elektrik sinyali üretilir ve gönderilir. Senkro alıcı; Senkro vericiden aldığı sinyale göre kendi pozisyonunu, konumunu
belirleyen cihazdır. Senkrolerin çalışma prensibi, verici senkronun pozisyonu, alıcı senkroya elektriksel olarak iletilir ve alıcı senkro da kendi pozisyonunu verici senkroya göre uyarlar.
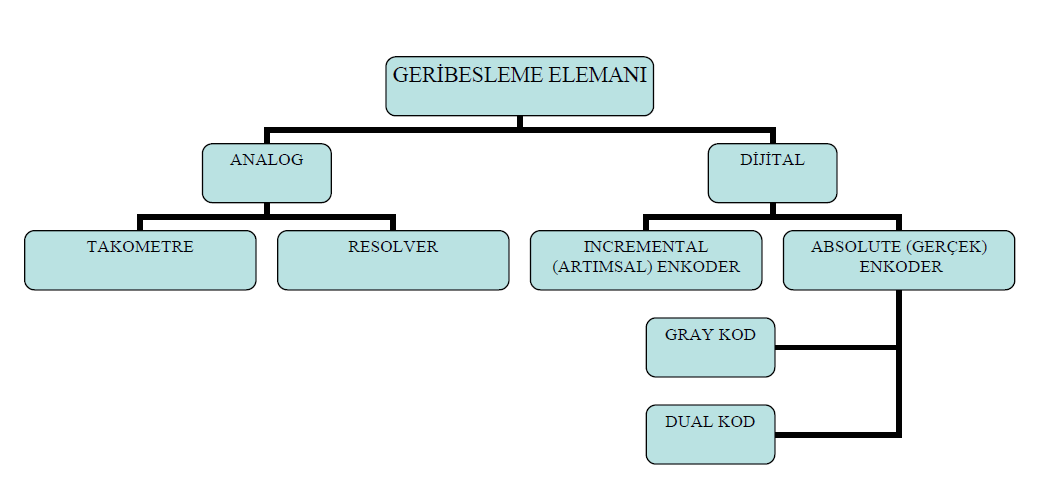
TAKOGENERATÖRLER
Tako generatörler yapı ve çalışma bakımından iki tiptirler.
1) Analog takometreler
2) Dijital takometreler
ANALOG-TAKOMETRE
Bunlar aslında bir doğru akım ya da bir alternatif akım generatörüdür. En önemli özelliği Volt / Devir sayısı oranı sabit olmasıdır. Yani dönme sayısı ile ürettiği gerilim orantılı olarak değişir. Ölçme amaçlı olduğu için 5-10 watt civarındadır.
ALTERNATİF-AKIM-TAKO-GENERATÖRÜNÜN-ÇALIŞMA-PRENSİBİ
Yapısı: Bir fazlı alternatif akım generatörünün minyatürüdür. Ancak burada endüktör sargısı yerine sabit mıknatıs vardır. Gövde üzerinde stator sargıları mevcuttur.

Rotor Çalışması: Rotor hareketsiz iken mıknatıs üzerindeki sargılar, sabit bir alan içinde olduklarından üzerinde bir gerilim doğmaz. Ancak rotor döndürülünce rotor dişlileri sabit mıknatıs önünden geçerken manyetik alan devresini, bir dişli üzerinden bir boşluk üzerinden tamamlamak zorunda kalacaktır. Yani sabit mıknatısın önüne rotorun dişi geldiğinde manyetik geçirgenlik yüksek olacak, boşluk geldiğinde manyetik geçirgenlik düşük olacaktır.
Böylece manyetik direnç değişken olduğundan bobinler değişken şiddette manyetik alan içinde kalmış olacaktır. Değişken manyetik alan içerisinde kalan bobinde bir gerilim doğar. Rotor sargılarında, rotorun hızına bağlı olarak sinüsoidal bir gerilim meydana gelecektir. Stator sargılarında meydana gelen sinüsoidal’ın genliği potansiyometre ile ayarlanabilmektedir.
Bu tür takometrelerde, rotor bir devir yaptığında, diş sayısı kadar saykıl meydana gelmektedir. Bir saniyede ölçülen saykıl sayısı , dişli sayısına bölünürse saniyedeki
devir bulunur. Burada devir sayısını, devir / dakika cinsinden bulmak için 60 ile çarpmak gerekir.
DİJİTAL-TAKOMETRELER
Dönen mil üzerinde bir delikli disk bulunur. Delikli diskin bir tarafında ışık kaynağı , diğer tarafında da ışık sensörü bulunur. Delikli diskin her hareketinde delikten geçen ışık, ışık sensörünü uyarır. Işık sensörüne gelen kesik kesik ışık, elektriksel sinyale dönüştürülür. Elde edilen elektriksel sinyal bir frekans/ gerilim dönüştürücü ile doğru akıma çevrilerek ölçülür. Doğru akımın değeri ile devir sayısı arasında doğrusal bir ilişki olduğundan sonuçta devir ölçülmüş olur.
Yüksek devirli makinelerde tako generatörler motora hiç yük etkisi yaratmaması istenir. Bu tür yerlerde sayısal takometreler kullanılır.Takometrenin içinde bir ışık kaynağı ve ışık sensörü bulunur. Işık kaynağından çıkan ışık, mil üzerinde bir yansıtıcı ile ışık sensörü uyarılır. Işık sensörü kesik kesik gelen her bir ışık dalgasını bir tetikleme palsi şeklinde bir sayıcı devre girişine uygular. Sayıcının tasarımına göre çıkış bilgisi iki şekilde alınabilir.
1) Bir önceki örnekteki gibi frekans / gerilim dönüştürücü arabirim ile ölçme yapılabilir.
2) Elde edilen frekans, bir tur başına milin verdiği pals sayısına bölünür. Yine elde edilen sayı 60 ile çarpılarak dakikadaki devir sayısı bulunur.
ŞAFT-POZİSYONU-VE-SAYISAL-KODLAYICILAR
Hareket eden bir milin duruş pozisyonunu belirlemede kullanılan dönüştürücülere şaft pozisyon dönüştürücüleri denir. Bu tip dönüştürücüler yapısı ve çalışması ile üç grupta toplanabilir.
- 1) Fırça şaft kodlayıcı
- 2) Manyetik şaft kodlayıcı
- 3) Optik şaft kodlayıcılar
MANYETİK-ŞALT-KODLAYICILARI
Bu tip kodlayıcılarda ise dönen disk üzerine magnetik ve magnetik olmayan parçalar yerleştirilir. Disk üzerine basan, magnetik alanlardan etkilenen bir başka sensörle şaft pozisyonu belirlenir.
OPTİK-ŞAFT-KODLAYICILAR
Bu tip şaft kodlayıcıları üç kısımdan oluşmaktadır.
- 1) Disk, diskin üzeri ışığı geçiren ve geçirmeyen kısımlara ayrılmıştır.
- 2) Işık kaynağı
- 3) Işığı algılayan ışık sensörü.
Sayısallaştırılmış disk, bir yanında ışık kaynağı, diğer tarafına da ışık sensörü yerleştirilmiştir. Işık sensörü diskin şeffaf yerine geldiğinde üzerinde 1 değeri, opak kısmına geldiğinde ise 0 değeri oluşur.
OTOMATİK-KONTROL-SİSTEMLERİ
Bilim ve teknoloji ilerledikçe insan kas gücünün üretimdeki payı azaltmaktadır. Üretimi, makine ile veya insan gücüyle diye ayırsak, sürekli makine tarafı artma eğilimindedir. Makinelerin kullanımı da yine insan denetimi yerine başka makineler veya teçhizatlar yardımıyla yapılmaya çalışılmaktadır. Bilgisayarlı takım tezgahlarında ( CNC ) nerdeyse çalışan sistem üzerinde insan denetimi yok denecek düzeydedir.
Üretilmek istenen ürünün şekli bilgisayar ile çizilerek, elde edilen şekil bilgisayar programına dönüştürülerek üretim yapılmaktadır. Otomatik kontrol sistemleri, çalışan sistemlerin insan gücüne gerek kalmadan denetlenmesini, kontrol edilmesini konu olarak alır. Dünyada emek yoğun üretim pahalı bir üretim yöntemi haline gelmiştir. Otomasyon sistemi ile üretim, daha ekonomik olmaktadır. Üretimin her aşamasına hızlı bir şekilde girmeye devam ediyor.
Böylece daha ucuz ve standardı önceden belirtilen ölçülerde üretim yapılabiliyor. İyi yetişmiş bir kalifiye elemanın manuel tezgahlarda 4 saatte ürettiği bir ürün, otomatik
sistemlerde 7 dakika gibi kısa sürede üretiliyor. Arada 34 kat gibi bir fark var. Bu fark
maliyet açısından kapatılamaz büyüklüktedir. Sağlık ve çevre koşulları dikkate alındığında bazı iş alanlarında insan çalıştırmak mümkün değildir. (Çok sıcak yerler, zehirli yerler, tehlikeli yerler gibi )
Otomatik kontrol sistemlerinin tarihi gelişmesine baktığımızda ilk olarak buhar makinelerini görürüz. Burada buhar makinesinin hızı otomatik olarak denetlenmektedir. Buhar makinesinin hızı arttıkça makinenin miline bağlı uçar toplar merkez kaç kuvvetinden dolayı yukarı çıkar. Uçar topların hareketi mil üzerine yerleştirilmiş kaygan mekanizmayı harekete geçirerek yukarı kaymasını sağlar.
Bunun yukarı kayması buhar kanalını kontrol ederek buhar makinesine giden buhar miktarını azaltarak hız artışını engeller. Aynı şekilde buhar makinesinin devri azalınca uçar toplar aşağıya doğru inmek ister. Buna bağlı mekanizma aşağı kayar, bu da buhar valfini kontrol ederek buhar girişini arttırır. Böylece buhar makinesinin hızı insan denetimine gerek kalmadan yapılmıştır.
GERİ-BESLEME-ÇEŞİTLERİ

Çıkıştan alınan geri besleme sinyali girişi, arttıracak şekilde uygulanırsa buna pozitif geri besleme denir. Giriş sinyalini azaltacak yönde uygulanırsa negatif geri besleme adını alır. Otomatik kontrol sistemlerinde negatif geri besleme kullanılır. Çünkü otomatik kontrol sistemlerinde esas amaç her hangi bir fiziksel büyüklüğü kontrol altına almaktır.
Çıkıştan alınan sinyal girişi arttıracak şekilde uygulanacak olursa, giriş artınca çıkış artar, çıkıştan alınan geri besleme sinyali artarak sürekli girişi arttırır. Dolayısıyla çıkışta sürekli artış içerisinde olacaktır. Bu artış bir süre sonra sistemin çıkışını sıfıra götürüp, tekrar salınım yaparak devamlı karasız çalışacaktır.
Pozitif geri besleme osilatörlerde kullanılır. LC tank devresinde salınımlar esnasında kaybolan enerjiyi takviye amacıyla geri besleme yapılır. Sönümsüz osilasyon ancak pozitif geri besleme ile elde edilir.
Çıkıştan alınan sinyal girişi azaltacak yönde uygulanırsa bu tip geri beslemeye negatif geri besleme denir. Sistem girişi ve geri besleme oranı herhangi bir değere ayarlanır, ve bu değerin sabit olması istenir. Sistemde bir değişme olmazsa çalışmasını ayarlandığı gibi sürdürür. Dışarıdan gelen bir bozucu etki sonunda çıkışta bir azalma olursa, bu azalma geri besleme sinyalini de azaltacaktır. Girişteki değer ile geri besleme arasındaki değer artacak ve yükseltici devresine daha büyük bir sinyal gireceğinden, çıkıştaki azalmayı önleyecektir. Çıkış yükselecek olursa, geri besleme sinyali de yükselecek,girişi daha fazla azaltarak çıkıştaki artışı önlemeye çalışacaktır.
BLOK-DİYAGRAMLARI
Bir kontrol sistemi bir çok elemanlardan oluşabilir. Sistemin türüne ve işlevine bağlı olarak eleman sayısı değişir. Kontrol sisteminde her bir eleman tarafından oluşturulan fonksiyonları göstermek için blok diyagramı olarak isimlendirilen bir diyagram kullanılır
Bir sistemin blok diyagramı, sistemin her bir eleman ya da eleman grubunun fonksiyonel veya sinyal akışının grafiksel gösterimidir. Blok diyagramı çeşitli elemanlar arasıda varolan karşılıklı bağıntıyı tanımlar.
BLOK-DİYAGRAMI-ELEMANLARI
Bir blok diyagramı bloklar,oklar,toplama noktaları ve ayrılma noktalarından (kol noktası)meydana gelmiştir. Blok diyagramında tüm sistem değişkenleri birbirine işlevsel (fonksiyonel) bloklar halinde bağlıdır.
SERVO-KONTROLÖR
Servo kontrolör bir servo motorun hız ve torkunu kontrol ede. Günümüzde kullanılan servo kontrolörler sayısal kontrolörlerdir. Sayısal kontrolörlerin örneksel (analog) kontrolörlere oranla aşağıdaki üstünlükleri vardır.
• Bilgisayar destekli uygulamaları kolaydır,
• Diğer birimlerle haberleşmesi kolay ve güvenilirdir.
• İşaret işleme kolaydır,
• Çalışma koşulları sınırlarında uzun ömürlüdürler.
Günümüzde çeşitli üretici firmalar tarafından üretilen çok farklı işlevlere ve güçlere sahip servo motor sürücüleri bulunmaktadır. Her üretici firmanın kendine özgü geliştirdikleri teknik ve özelikleri olmasına rağmen, tipik bir servo sürücüde ortak özellikler bulunur. Biz burada bu ortak özellikleri anlatacağız. Aşağıdaki şekilde çeşitli servo sürücüler görülmektedir.
Genel olarak bir servo sürücü iki ana birimden oluşur
• Güç kaynağı birimi (power supply module)
• eksen birimi (axis module)
Güç kaynağı birimi, sürücü için gerekli besleme gerilimleri yanı sıra, eksen kontrolleri için gerekli güçleri, servo motor frenleme gerilimini, sürücü ve sistemi koruyacak bir çok koruma düzeneği ile standart bir haberleşme kapısına (RS 232 RS 485) sahiptir.
Eksen birimi ise servo motor hız ve torkunu kontrol eder. Bu kontrol için gerekli elektronik donanımı içerir.Günümüzde kullanılan bir çok servo sistem servo motor yanı sıra bu sistemde kullanılabilecek diğer yardımcı motor, sensör, anahtar ve diğer elemanların da kontroli için gerekli; sayısal giriş/çıkış, örneksel giriş/çıkış ve kontrol elektroniğine de sahiptirler.
Başka bir deyişle ayrıca bir PLC’ye (Programable Logic Controller=Programlanabilir sayısal kontrolör) gerek kalmaksızın sistemin kontrolini yapabilecek elektronik donanım ve yazılıma
sahiptirler.
GRAFİKSEL-PROGRAMLAMA
Bazı sürücüler programlamayı oldukça kolaylaştıracak grafiksel programlama araçları sunarlar. Kullanıcının üst düzeyde programlama bilgisi olmasa dahi rahatlıkla programlama araçlarını grafiksel olarak kullanarak servo sistemi istediği gibi programlayabilir.
DÜŞÜK-DÜZEY-(ASSEMBLER)-PROGRAMLAMA
Çoğu servo sürücü donanım yapısına uygun assembler programlamaya olanak tanır. Assembler programlama esnek ve hızlı olmasına karşın iyi bir programlama bilgisi gerektirir. Bu nedenle servo sistemi assembler programlama için hem programlama altyapısı bilgilerine ve o sürücü için gerekli özel assembler bilgilerine sahip olmak gerekir. Her sürücü sisteminin assembler komutları ve yapısı kendisine özgü farklılıklar taşır. Ancak temelde yaptıkları işlevler ve yapıları birbirlerine çok benzerdir.
CAM-PROGRAMLAMA
Bazı ileri teknoloji servo sürücüleri kendilerine özgü CAM (Computer Aided Manufacture= Bilgisayar Destekli Üretim) programlara sahiptirler. Bu CAM programları ile kolaylıkla bazı servo sistem uygulamaları gerçekleştirilebilir. Ancak bir endüstriyel otomasyon için çoğunlukla bir genel amaçlı SCADA ( ) programı kullanılır. Servo sürücülerin bu SCADA programları ile birlikte doğrudan kullanılabilmesi için de o SCADA için yazılmış bir sürücü programının olması gerekir.
Eğer geliştirilecek uygulama küçük çaplı bir uygulama ise SCADA programı yerine yazılacak bir izleme ve kontrol programı kullanılabilir. Bu programı yazmak için ise de sürücü parametrelerini görüntüleme ve değiştirme amacı ile sürücü haberleşme protokollerine ihtiyaç duyulur.
SEZİCİ ELEMANLAR VE DÖNÜŞTÜRÜCÜLER ( SENSÖRLER VE TRANSDÜSERLER)
POZİSYON DUYARLIK ELEMANLARI
DİRENÇ TİPİ POTANSİYOMETRELER
Dönel tip potansiyometre
ENDÜKTİF POTANSİYOMETRELER :
FOTO-ELEKTRİKSEL DÖNÜŞTÜRÜCÜLER
FOTO VOLTAİK PİL (SOLARSEL )
FOTOSEL (PHOTOCONDUCTİVE CELL)
FOTODİYOT
FOTOTRANSİSTÖR
LED (Light Emiting Diode )
OPTO KUPLÖR
FOTOELEKTRİK SENSÖRLER
KARŞILIKLI FOTOSEL:
REFLEKTÖRLÜ FOTOSEL
CİSİMDEN YANSIMALI FOTOSEL
FİBER OPTİKLİ FOTOSEL
RENK SEÇİCİ FOTOSEL
LÜMİNİSANS SEÇİCİ FOTOSELLER
MANYETİK SENSÖRLER
ENDÜKTİF YAKLAŞIM SENSÖRLERİ
KAPASİTİF DÖNÜŞTÜRÜCÜLER
KAPASİTİF YAKLAŞIM DEDEKTÖRLERİ
DİĞER DÖNÜŞTÜRÜCÜLER
1.6.1 ISI SENSÖRLERİ
Bİ-METAL ÇİFT
BASINÇ SENSÖRLERİ
NEM SENSÖRLERİ
Senkrolar
SENKRO KONTROL TRANSFORMATÖRLERİ
TAKOGENERATÖRLER
ANALOG TAKOMETRE
ALTERNATİF AKIM TAKO GENERATÖRÜNÜN ÇALIŞMA PRENSİBİ
DOĞRU AKIM TAKO GENERATÖRLERİ
DİJİTAL TAKOMETRELER
ŞAFT POZİSYONU VE SAYISAL KODLAYICILAR
FIRÇA ŞAFT KODLAYICILAR:
MANYETİK ŞALT KODLAYICILARI.
OPTİK ŞAFT KODLAYICILAR
yukarıda özetler verilmiştir;
Şifre-Pass: 320volt.com
Yayım tarihi: 2009/04/19 Etiketler: dönüştürücüler, motor, otomasyon, otomatik kontrol, senkro mekanizmalar, sensörler, servo, tako generatörler
Teşekkürler 🙂