
Robot projelerinizde özellikle mekanik aksamlarda, robot çalışma sisteminde, robot malzeme bilgisinde işinize yarayacak ilham verecek robot tasarımları 3 adet çalışma bulunuyor. Emeği geçen hazırlayan kişilere teşekkürler.
PCL-818HG ile serpent robot kontrol sistemi tasarımı

Hazırlayan: Can ARPAÇAY – Robot Hakkında Genel Bilgiler: Proje konumuz olan Scara Serpent 1 robotu Feed back firması tarafından üretilmiştir. Serpent’ in hareketi çok sadedir ama bir çok montaj ve al-yerleştir isine de uygun yapıdadır. Serpent robotunun asıl amacı bir cismi tutma, kaldırma ve yer değiştirme olan robottur.
Robot; gövde, gövdeye bağlı bir anakol, ön kol, tutma kolu ve çenesinden oluşmaktadır. Robotun yaptığı hareketler mekanik olarak gerçekleşir ve çok hassas değildir. Hassaslığı arttırmak için kapalı devre kontrol ile geri besleme yapılır. Tutma kolunun yukarı aşağı dikey hareketleri ve gripper denilen tutma çenesinin açılıp kapanması pnömatik sistem sayesinde olur.
SCARA Robot tasarımı

Hazırlayanlar. Tarık KURU Mehmet ÖZKARAKOÇ – Bu çalışmada endüstride geniş kullanım alanı olan Scara robot tasarımı yapılmıstır. Çalışmanın ilk bölümünde Scara robot ve aparatları tanıtılmış ve teknik özelliklerine deginilmistir. ikinci bölümde, çesitli yatakların avantajları düşünülerek uygun yataklama tipi seçilmiş, robotun hareket elemanlarının (kayıs, kasnak) hesapları yapılmıştır. Son bölümde robotun Solid Works ile tasarım yapılmıştır.
Üç veya daha fazla programlanabilir ekseni olan, otomatik kontrollü, programlanabilir, çok amaçlı, bir yerde sabit duran veya tekerlekleri olan endüstriyel uygulamalarda kullanılan manipülatördür. Bir robot, çeşitli işleri yerine getirmek üzere, malzeme, parça veya özel aletleri degişken programlanabilir hareketlerle tasımak üzere tasarlanmıs, yeniden programlanabilir, çok fonksiyonlu bir aygıttır. Robot uygulamaları başlıca otomotiv, elektrik, elektronik ve mekanik olmak üzere endüstrinin hemen her alanında görülebilir.
SCARA robot için tutucu (gripper) tasarımı ve imalatı

Hazırlayan: Mazhar Çağrı GÜZELER – Bu çalışmada endüstride geniş kullanım alanı olan parçayı belirli bir konumdan alıp belirlenmiş diğer bir konuma getiren Scara robotun gripperinin tasarımı ve imalatı gerçekleşmiştir. Gripper (tutucuları) iş parçasını insanların parmaklarıyla tuttuğu gibi tutarak parçanın belirlenen konuma gitmesine yardımcı olmaktadır.
Gripper insan parmakları gibi düşünülebilir. Burada gripperin yaptığı hareket, insanların iki parmağıyla bir objeyi tutup kaldırma hareketinden çok benzerdir. Fark ise gripperin hareketleri biraz daha sınırlı olmasıdır. Tutucu insan parmağından esinlenerek tasarlanmıştır.
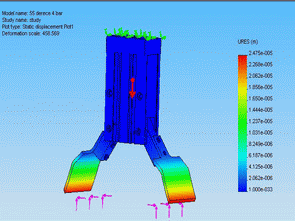
Gripper (tutucu)’ı oluşturan parçalar Solid Works programı ile modellenmiş ve statik analizler CosmosWorks programı ile gripper’ın montajı üzerinde gerçekleştirilmiştir. Bu şekilde gripperin maruz kalacağı gerilmeler ve gripperda meydana gelecek deformasyonlar incelenmiştir.
Robot tasarımlarına ait dosyalar;
Şifre-Pass: 320volt.com
Yayım tarihi: 2010/11/18 Etiketler: robot gripper, robot projeleri, robot scara, robot tasarımları, robot yapımı
Merhaba link çalışmıyor
Teşekkürler, güzel paylaşım.