
Hazırlayan:Oktay YURTTAKAL Robotik sistemler gün geçtikçe daha yaygın bir şekilde günlük yasamda ve endüstriyel otomasyon uygulamalarında yer almaya baslamıştır. Bu sistemler dogruluk, tekrarlanabilirlik ve hız açısından önemli avantajlar getirdiği gibi ekonomik olarak da büyük fayda sağlamaktadır. Bu sistemlerin çoğu sabit bir tabana monte edilmiştir, kendi kendine yer değiştiremezler ve işin sisteme getirilmesi gerekir.
Yapılacak işin alanda dagınık olduğu ya da tasıma amaçlı robotik sistemlerde ise gezginlik kabiliyeti önem kazanır. Bizlerin bugün bile basit olarak tanımlayabileceğimiz gezgin robotları önemli kılan şey, şu an yaptıkları ve insanoğlunun yaratıcılığını kullanarak ilerde yapabilecekleri işlerdir. Bu tez kapsamında ise engelden kaçarak yolunu bulan türde bir gezgin robot tasarlamak amaçlanmıştır.
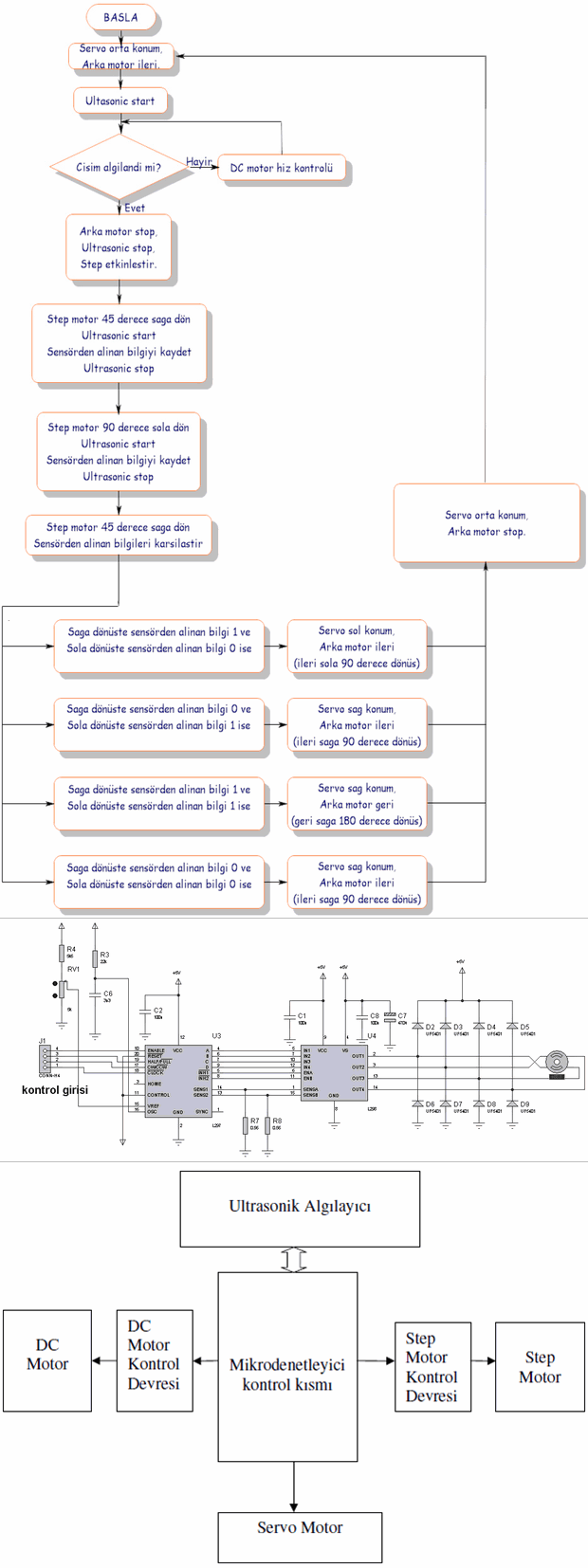
Gezgin robot; DC motor sürücü devresi, mikrodenetleyici yazılımı, servo motor kontrolü, step motor kontrolü, ultrasonik algılama devresi gibi alt sistemlerden olusmaktadır. Bu alt sistemler önce ayrı ayrı incelenip daha sonra tek bir sistem elde edilmesi amaçlanmıstır.
Tasarlanan robotun ana islevi söyle açıklanabilir: Gezgin robot sahip oldugu ultrasonik algılayıcı ile çevresindeki cisimleri algılayıp hareketini bu cisimlerin konumuna göre düzenleyecektir.
Projeye eklenilmesi düsünülen özellikler söyledir:
• Kisisel bilgisayar ile RS232 protokolü üzerinden haberlesmesi;
• Kisisel bilgisayar üzerinde çalısacak bir arayüz programı
• RF kanal üzerinden veri iletimi yapılması
Bu çalışma kapsamında robotik kavramı, robot uygulamaları, robot teknolojisi robot mekanizmaları hakkında geniş bir araştırma yapılmış ve bu araştırmalara göre bir gezgin robot gerçeklenmiştir.
Bu projedeki amaç, gezgin robotun labirent tarzındaki bir bölgeden çıkması sağlamaktır. Gezgin robot, sahip olduğu ultrasonik algılayıcılar ile hareket esnasında kendi çevresindeki cisimleri algılayacak ve bu cisimlerin konumuna göre hareketine yön verecektir.
Robot ön kısmında bulunan ultrasonik sensör hareket doğrultusundaki cismi algılayacak ve robot bu anda duracaktır. Bu andan itibaren robotun karar verme mekanizmasını oluşturan devreye girecektir. Sensörlerin oturduğu hareketli kısmı oluşturan step motor dönerek robotun etrafındaki cisimleri bulundukları konumları tarayacak ve alınan veriler mikrodenetleyici içerisinde işlendikten sonra gezgin robotun hareket yönüne karar verecektir. Şöyle ki; eğer algılama sonucunda sağ tarafta bir cisim olduğu kanısına varılırsa robot belli bir açıyla sola dönecek ve daha sonra hareketine düz olarak devam edecektir. Yada tam tersi şekilde solda bir cisim varsa sağa dönüp hareketine devam edecektir. Bu özelliklere ek olarak her iki tarafta cisim olması veya olmaması durumlarına da çözüm geliştirebilir.
Gezgin robot, sensörü sayesinde belli mesafedeki cisimleri algılayıp hareketini etrafındaki cisimlere göre yönlendirerek labirent tarzındaki bir bölgeden rahatlıkla çıkabilmektedir. Bu uygulama sonucunda tatmin edici sonuçlar alınmasına rağmen özellikle mekanik sistemle ilgili sorunların çalışmayı yavaşlattığı ve sınırlandırdığı gözlemlenmiştir. Daha sonra yapılacak çalışmalarda mekanik sistemin çok dikkatli seçilmesi eğer şartlar uygunsa tasarıma uygun mekanik sistem ürettirilmesi ortaya çıkan bir sonuçtur.
Projenin pdf dosyasına buradan ulaşabilirsiniz
Emeği geçen kişilere Teşekkürler
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/07/13 Etiketler: gezgin robot, microchip pic projeleri, motor, PIC16F877 örnekleri, Rf, robot projeleri robotlar, robot projesi, robot yapımı, rs232, servo, sürücü, ultrasonik, ultrasonik robot, ultrasonik sensör
tam olarak tüm devresini bulamadım ama bi yardımcı olabilirmisiniz…
evet tüm devre yok parça parça anlatılmış bu tip tez,makale tarzı paylaşımlarda hazır proje olması önemli değil bence içerikteki bilgiler önemli olan kullanılan parçalar yöntemler hakkında detaylı bilgiler var
ekteki dosya yok admin arkadaşım yardımcı olursanız sevinirim ve elinize saglık
Link güncellendi ek olarak alternatif link eklendi
Slm arkadaşlar devre hakkında bikaç şey ögrenecektim
1) Devreyi pic16f84a ya asm kodları ile yapacagım ama asm dilinde sensörü nasıl tanıtacagım
2) Sensörün çıkışına göre stem motor kontrol edecem
3) Yardımcı olabilecek arkadaşlara şimdiden teşekkür ederim 😀
Devreyi aptım ama çalışmadı neden acaba.sadece sensör kısmını yapma çalıştım engel görünce ledin yanması gerekmiyormu yaptım ama hiç bir faliyet yok yardımlarınızı ve önerilerinizi bekliyorum arkadaşlar.
Kodları çalışıyor mu ona göre yapmaya başlıcam