
Otomotiv elektroniği veya oto beyn, motor servislerinin işine yarayacak bir proje.. Avrupa otomobillerinin bir çok motoru, BOSCH tarafından önerilen, ikisi menşei kesin olarak belirlemek için çıkarılan 60 dişli bir disk olan krank mili konum sensörünü temel alan bir motor yönetim sistemi kullanır. Bu sistem oldukça güvenilirdir ve bir takım avantajlara sahiptir.

TDC konumunun genellikle çift geçişten önceki 20. dişin başlangıcına karşılık geldiğini belirtmekte fayda var (tüm motorlarda değil). Bu durumda, bir çift geçiş – referans noktası, CV’nin düzensiz dönüşünün minimum olduğu konuma düşer.
Başlangıçta, seri kontrol ünitelerini karakterize etmek için kullanmak istedim, bu yüzden hızı az çok doğru bir şekilde ayarlamak gerekliydi. Ancak bu, doğrulama amaçlı kullanımı engellemez. Bunu yapmak için, her darbenin süresi, önceden hesaplanmış bir zamanlayıcı ve ön ölçekleyici değerleri tablosu tarafından ayarlanır.
Mevcut devirler, dördüncü biti her zaman 0 yanacak şekilde değiştirilen dört haneli bir göstergede görüntülenir. Yani, gerçekte 3 bit kullanılır. Hız, artı ve eksi düğmeleriyle 50 rpm’lik artışlarla ayarlanır.
Çıkış aşaması sadece bir anahtardır ve belleğin yarısı için bu yeterlidir, sadece bazıları için çıkışta bir transformatörün açılması gerekebilir. İkinci sinyal (PORTB, 0) bir eksantrik mili faz sinyali üretmek için tasarlanmıştır, ancak bunu henüz yapmadım.
Krank Mili Simülatör Devre Şeması
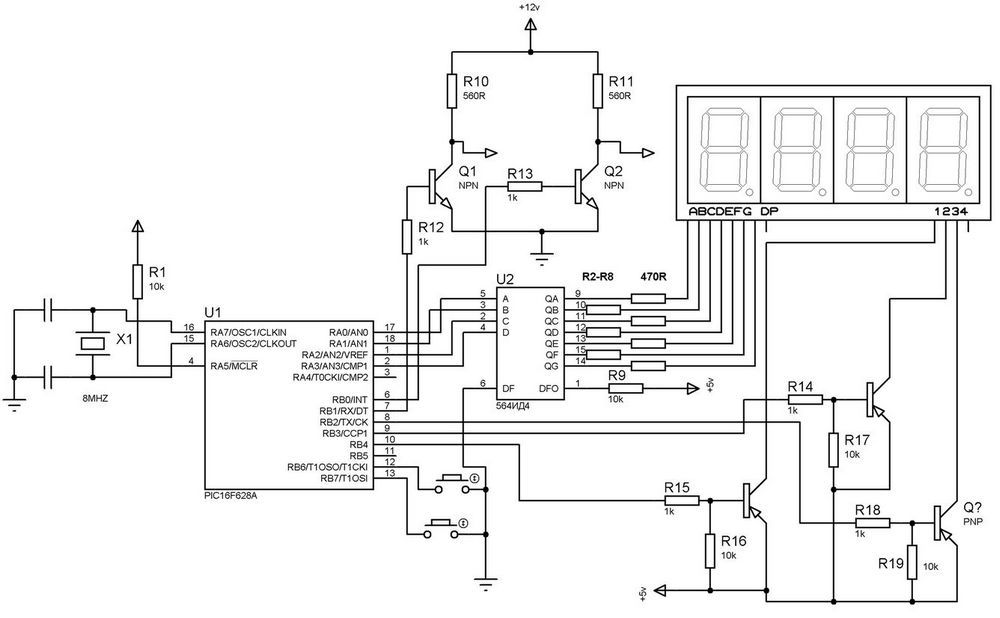
Kod çözücü için, CD4055BE CD4511 kullanılabilir. El altında olduğu ortaya çıkan 4 adet ayrı göstergeler kullandım (HDN1075D), ancak elbette, devrenin uygun şekilde düzeltilmesiyle herhangi birini yapabilirsiniz.
Sinyallerinin kodunun çözülmesi hakkında. Tekerleği yeniden icat etmemek için Bosch beyinlerinin çalışmalarının tescilli açıklamasına döndüm.
Basitleştirilmiş bir biçimde, tanıma ilkesi şöyle görünür:
Ana diskin şekline bağlı olarak, DPKV işlemci 2 modda çalışabilir:
1. Bir kontrol sistemi arayın, bir işaretleyici segmenti arar. 59 ve 60 diş eksik. Bu modda ateşleme ve enjeksiyon darbeleri üretmek mümkün değildir.
2. Senkronize a, kontrol sistemi diş numarasını tam olarak bildiğinde geçerli işleyici olayını başlatan ana disk. Bu modda ateşleme ve enjeksiyon darbeleri net bir şekilde oluşturulabilir. diş numarasına ve silindir numarasına bağlıdır.
Arama modu: Program, mevcut dişin ilk olduğu varsayımını kontrol eder ve bunun için son iki diş arasındaki aralığı, iki sondan bir önceki diş arasındaki aralığın en az iki katı kadar kontrol eder.
Bu koşul sağlanır sağlanmaz program senkronize moda geçer. Her ihtimale karşı, sinyal süresinin bir öncekinin dört katını geçmediği başka bir koşul kontrol edilir.
Eksik diş simülatörünün çalışması: Olayları kontrol sisteminde 6 derecelik bir doğrulukla tüm açı aralığında bağlayabilmek için program 59 ve 60 numaralı eksik dişlerin taklidini kullanır. Böylece, DPKV olaylarının yönetimi için, referans disk restore edilir ve eksik dişlerin tamamen görünmezliği sağlanır. Aynı zamanda, program doğal olarak referans diskin 57-58-59-60 diş aralığında düzgün bir şekilde hızlandırılmış hareketini varsayar, çünkü gerçekte bu hareket eşit olarak hızlandırılamayabilir, yuvanın konumu özel olarak seçilmiştir. dişler 59 ve 60, açı ile motor kontrolünün kritik bölgesine girmez (örneğin, sırasıyla her silindir için UOZ +60 -10 PKV’nin oluşum alanı).
Senkronize modda, DPKV dişinin 58 olayını işlerken, program 59. dişin yokluğunu varsayar, bu nedenle CCP modülünü yakalama modundan karşılaştırma moduna geçirir, ardından program zamanlayıcının 58 numaralı dişte önceden yakalanmış durumunu alır ve ekler dişler 57 ve 58 arasındaki açısal aralıktır, böylece dişin sensörü 59 üzerinden geçiş momentini tahmin eder (bu açısal aralıkta diskin muntazam olarak hızlandırılmış dönüşünün varsayımına dayanarak). Karşılaştırma modülü, zamanlayıcı kayıtlarının başka bir eşleşmesini tespit ettiğinde, eksik 59 diş olarak değerlendirilecek yeni bir DPKV olay bayrağı oluşacaktır. Aynı şekilde, eksik 60. dişin geçme anı ayarlanacak, işleyici tekrar CCP modülünü yakalama moduna geçirecek, böylece simülatör devre dışı bırakılacak ve bir sonraki işleyici çağrısı 1.’nin donanımı tarafından başlatılacaktır.
Dönme hızını, düzensizliği ve hata göstergesini belirlemeye yönelik algoritmalar burada atlanmıştır. İlk aşamada, bu çok önemli değil. Yine de programda uyguladığım bu algoritma, mevcut diş numarasını başarıyla tanır ve herhangi bir harici olayı ona bağlamanıza izin verir.
Bu programı, farklı bir DPKV tipine sahip bir motorun krank mili sensörü “60-2” ECU’suna bağlamak için kullandım. Yaklaşık yarım yıldır çok iyi çalışıyor. (BMW hibrit motor, Honda beyinleri). Bu temelde, hazırda iyi bir ateşleme sistemi oluşturmak mümkündür, algoritma büyük olasılıkla benzerdir, ancak geliştiriciler tarafından gizlenmiştir.
Krank Mili Konum Sensörü Simülatörü projesine ait kaynak .asm kod ve excel dosyası:
Şifre-Pass: 320volt.com
Not: Açıklama kaynak sitede ki yazar Mehanikl`in yazısından çevirilmiştir Kaynak chipmk.ru (site kapalı)
Yayım tarihi: 2022/03/26 Etiketler: microchip pic projeleri, PIC16F628 örnekleri
Tesekkurler üstad. Bugünlerde eski karbüratörlü arabamı elektronik zamanli ateslemeye cevirmeyi düsünüyordum. Tamda üstüne buna rasgeldim. Benim icin iyi bir kaynak olabilir.
Ustam kolay gelsin “Beast EMS” bir araştır derim:)