Robot kol bilgisayarın seri portundan kontrol edilebiliyor kontrol programı Visual Basic ile hazırlanmış programın yazımına dair bilgiler verilmiş. Farklı seri port kontrol programlarıda kullanılabilir kullanılan mikrodenetleyici pic16f877 yazılımı ise jal ile hazırlanmış kaynak kodları var.

Elektrik Mühendisliği Bölümü, Yıldız Teknik Üniversitesi, İstanbul Hazırlayanlar: Engin Ayçiçek – Selin Özçıra Emeği geçen hazırlayan kişilere teşekkürler.
![]()
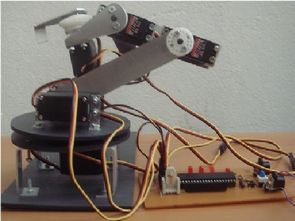
Bu projedeki amaç 3 eksenli hareket kabiliyetine sahip robotun seri porttan kontrolünü sağlamaktır. Bu projede otonom ve insan kontrollü bir robot kolun elektrik devreleri, mekanik yapıları ve PIC programları ile A’dan Z’ ye anlatılmaktadır. Projede yer alan robot kol mümkün olduğunca az mekanik parçadan oluşacak şekilde düzenlenmiştir.
Robotların mekanizmalarının yapımında sadece plastik ve alüminyum malzemeler kullanılmıştır. Robot yapımında kullanılan plastik ve alüminyum bütün malzemelerin teknik çizimleri ve ölçüleri projede yer almaktadır. Robotları oluşturan ikinci birim ise elektronik yapılarıdır. Robot kol projesinde kullanılan kontrol, iletişim devrelerinin şematik ve baskı devreleri projede bulunmaktadır.

RC Servo Motor Kontrol Devresi
Kullandığımız RC servo motor kontrol devresi 8 adede kadar RC servo motor kontrol edebilmektedir. Devre üzerinde ayrıca PIC i devreden çıkarmadan programlayabilmek için ICSP soketi bulunmaktadır. Devredeki LCD 1 soketi paralel LCD bağlamak için, J15 soketi seri bilgi alışverişi yapabilmek için ve J2 soketi herhangi bir algılama devresi kullanılacaksa bunun devre bağlantısı için kullanılmıştır.
Devredeki PIC enerjisi J5 soketinden RC servo enerjisi J8 soketinden verilir. RC servo için 4.8V…6V arasında bir gerilim gerekmektedir. J8 soketinde 4 adet şarjlı kalem pil bağlamak yeterlidir.

PIC enerjisi için 9V luk pil kullanıldığında U3(78L05) bu gerilimi PIC in kullanacağı 5V a düşürmektedir. PIC in besleme gerilimi için 3 adet alkaline pil veya 4 adet şarjlı pil kullanıldığında U3 regüle entegresinin çalışmasına gerek yoktur.
Bu sebepten J7 soketine bir jumper takılarak U3 entegresinin çalışmaması sağlanır ve J5 soketine verilen gerilim aynen PIC e uygulanmış olur. Devrede E portuna bağlanmış olan 3 adet buton ve LED vardır. Bu buton ve LED ler devrelerin çalışmasının gözlenmesinde ve kontrolünde kullanılır.
Şifre-Pass: 320volt.com
Yayım tarihi: 2012/01/15 Etiketler: jal, jal robot, microchip pic projeleri, PIC16F877 örnekleri, robot arm, robot kol, seri port
dosyayı indirdim fakat visual basic kodları yok haliylede eksik bir devre olmuş oluyor…
Devre elemanlarının tam değerlerini vermeniz mümkün mü? Şekilden okunmayan elemanlarda var ama yardım ederseniz sevinirim