Hazırlayan: Paşa YAZICI ve Ertuğrul ÇELİK Emeği geçen kişilere Teşekkürler Bilgiler “Labirent Robotu” projesinden alınmıştır proje dosyaları olmadığı için (şema kod) ayıklama yapıldı diğer faydalı bilgileri yazıya ekledim robot projelerinizde işinize yarayacak sıkca kullanılan malzeme iletişim bilgileri vb.

![]()
Son olarak başlık çok uzun olacağı için belirtemediğim bilgiler labirent robotun yapımında karşılaşılan zorluklar ve micro code ile sutido ve pic basic pro kullanımı kurulumu hakkında bilgilerde var
L293D Motor Sürücü Entegresi
L293D, DC motor kullanılan robotlarda en çok kullanılan entegrelerden biridir. 16 bacaklı bu entegre, içinde iki adet H köprüsü ve bunlara bağlı hızlı diyot köprülerini barındırır. Her iki motora 600mA akım sağlayabilen bu entegre, aynı zamanda akım korumalıdır. Bu koruma, robotun talep ettiği akımı almasını engelleyebilir.
Şekil 2.12 L293D Motor Sürücü Entegresi

Entegrenin bağlantıları Şekil 2.13 ‘de görüldügü gibi yapılır. ENABLE1 bacağı sol kolondaki sürücüyü, ENABLE2 bacağı sağ kolondaki sürücüyü etkinleştirmek için kullanılır. Bu bacaklar +5V ‘a bağlanmazsa bu kolonlar devre dışı kalır. “Motor Voltage” bacağına +5V ‘den daha yüksek bir voltaj bağlanarak daha yüksek voltajlı motorlar sürülebilir. “Logical Voltage” (PIN16) bacağına kontrolörümüze verdigimiz voltajı vermeliyiz. Bu bacak bir referans bacagıdır ve entegremizin kontrolörden gelecek voltajı bilmesini sağlar.
Şekil 2.13 L293D Bacak Bağlantıları

Optik Sensör (CNY70)
Bu sensör siyah beyaz ayırımında veya dar bir alandaki cismin belirlenmesinde kullanılır. CNY70 ışın göndererek (dalga boyu 950 nanometre) ve bir yüzeye çarpıp geri dönen ışınları algılar (şekil 1). Eğer ışının yansıdığı yüzey siyah veya koyu renk ise ışının çoğu soğurulacağından algılayıcıya geri dönüş olmaz. Önünde bir cisim yoksa giden ışın geri dönmeyeceğinden, siyah cisimde olduğu gibi bir algılama olmaz. CNY70 ’in çıkışı gönderdiği ışını algılayamıyorsa 1 (siyah), algılıyorsa 0 (beyaz) olur. Bu sensörün ağırlığı 0.7 gr. civarındadır, genellikle çizgi izleyen robot yapımında kullanılmaktadır
Şekil 2.15 CNY70 Sensörü

CNY70 dört bacaklı bir entegre olup bunlardan ikisi topraktır. Diyota +5Volt gelirken transistörün toplayıcı (collector) bacağı devre için geribesleme (feedback) oluşturur.
Şekil 2.16 CNY70 İç Yapısı

RF
Tarih : Kablosuz (RF) teknoloji 3 Hz ile 300 GHz spectrum içerisinde elektromanyetik dalgaların işletilmesidir.Elektromanyetik dalgaların varlığı ilk olarak 1864 yılında James Maxwell tarafından öne sürüldü.1887 yıllında Heinrich Hertz tarafından varlığı kanıtlandı.1895 yılında Guglielmo Marconi tarafından icat edilen radio ile birlikte iletişim için kullanılabilecek bir teknoloji olduğu ortaya çıktı.
Temel Kavram : Kapalı bir sitemin elektrik enerjisiyle yüklenmesi sonucu oluşan statik bir elektrik alanda, bir değişim söz konusu olduğunda, elektromanyetik dalga oluşur. Bu dalganın şiddeti (E), ana kaynaktan olan mesafesinin karesinin tersi (E α R-2) oranında bir zayıflama ile yayılır.
Şekil 2.17 RF Dalga Yayılması

Esas olarak teori : Yükleme sisteminin, oluşan alanın bilgi taşıyabilmesi için düzgün aralıklarla elektromanyetik dalga oluşturabilecek şekilde modüle edilmesi, Bu dalgaların başka bir kapalı sisteme ulaştıklarında, o sistem içerisinde oluşturdukları değişimin algılanmasıdır
Spectrum
Tablo 2.3 Spectrum Tablosu

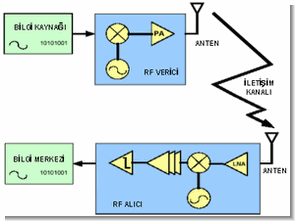
Temel Bileşenler
Şekil 2.18 RF ‘in Temel Bileşenleri

İletişim Kanalı
RF Link = (TX power) + (TX Anten Kazancı) + (RX Anten Kazancı) – (RX Duyarlılık)
RF Link = (10 dBm) + (0 dBm) + (0 dBm) – (-100dBm) = 110 dBm
Şekil 2.19 RF Mesafesi

Free Space Loss = 32.4 + 20log(f) + 20log(d)
f = Frekans(MHz) , d = Mesafe(Km)
RF Modüller ATX-34 (UHF ASK DATA TRANSMİTTER)
Genel özellikleri
- 433.9 MHz. UHF bandında EN 300 220 uyumludur.
- Yüksek frekans kararlılığı
- Düşük akım sarfiyatı ile pilli uygulamar için idealdir.
Şekil 2.20 RF Verici

Uygulama Alanları
- Uzaktan kontrol sistemleri
- Güvenlik amaçlı alarm sistemleri
- Oyuncaklar
Genel Açıklamalar : ATX-34 (UHF ASK data transmitter) modül, kısa mesafe erişimli telsiz cihazlarının temel standartları ile kurma ve kullanma esasları hakkında yönetmelik (TGM-STK-001) ‘in 433-434MHz. ISM bandı ile ilgili bölümünü kapsayacak şekilde tasarlanmıştır.
ATX-34 kısa mesafeli uzaktan kontrol uygulamaları için düşük fiyatı nedeniyle ideal bir çözümdür. Modülün anten haricinde herhangi bir RF komponente ihtiyacı olmadan pcb montajına uygun olarak tasarlanmıştır. Basit bir kablo kullanılarak anten bağlantısı yapılabilir.
Şekil 2.21 RF Verici Pin Ölçüleri

Tablo 2.4 Pin Özellikleri

Tablo 2.5 Teknik Özellikler

Besleme Voltajı : ATX-34 içerisinde bir voltaj regülatorü bulunmamaktadır. Tasarım pil kullanımı düşünülerek yapılmıştır. Bu nedenle besleme voltajında belirtilen değerlere dikkat edilmelidir. Modül belirtilen değerlerin altında bir besleme yapıldığında kararsız çalışacaktır. Besleme voltajı ve tapraklama GND bağlantısı belirtilen değerlerin üzerinde veya ters olursa, modülde kalıcı hasarlar açabilir. Düşük maliyet sağlanabilmesi için modül içerisine ters polarizasyondan koruyacak bir devre konulmamıştır. Besleme voltajında çalışma sürecinde ±100 mV değişimlerin üzerindeki değişimler modülün kararsız çalışmasına neden olur. Besleme devresinde regülator IC kullanılması önerilir.
Data Format
Modül ‘de, digital data girişi için DIN pini bulunur. DIN pini RF ile gönderilecek sinyallerin kullanıcı tarafından verildiği giriştir. Standart data protokolü şu şekildedir.
TX : preamble + sencron + data1+…..+dataX
En basit haberleşme sistemlerinde bile mesajın başlangıcı için bir preamble kullanılması neredeyse zorunludur. Preamble veri olarak ardışık 1 ve 0 lardan oluşan (01010101…) bir bit dizinidir. 5 byte 0x55 veya 0xAA olabilir. Gönderilen 1 ve 0 ‘ların süreleri eşit olmalıdır. Kısaca preamble donanım senkronizasyonunu sağlamaktadır. Sencron ise yazılımın senkronizasyonuna yardımcı olur.
Bit senkronizasyonunun sağlanması ve mesaj başlangıcının doğru tayin edilebilmesi için kullanılması gereklidir. Bu bit dizininin boyu uygulama gereksinimleri veya kısıtlamalarına göre değişebilmekle birlikte 5 byte 0x00 + 5 byte 0xFF olabilir veya bunun ne olacağına kişi kendisi karar verebilir. Data gönderirken araya boşluk girmemeli, girer ise tekrar preamble ve sencron gönderilmeli. RX tarafında preamble ‘a bakılmaz. Sadece sencron aranır, sonrasında data okunur
Şekil 2.22 Data İletişimi

Anten : Verimli data transferi ve alımı için gerekli en önemli iki nokta iyi bir anten ve doğru RF topraklama seçilmesidir. Anten olmadan datanın uzun mesafelere gönderilmesi mümkün değildir. Modül basit bir anten bağlantı pinine sahiptir. Uygun bir UHF anten doğrudan bu pine bağlanabilir. ATX-34 modülüne bağlanabilecek en basit anten 17.3cm uzunluğundaki bir kablonun anten girişine lehimlenmesidir. Anteni, modülden uzak bir yere bağlamanız gerekiyorsa 50 Ohm Coax anten kablosu kullanmanız gerekmektedir. Anten kablosunun topraklaması, modulun anten girişine yakın bir yerden yapılmalıdır.
- Anten 50 ohm empedanslı olmalıdır.
- Lambda/4 whip anten boyu 433MHz. için yaklaşık 17.3 cm dir.
- Anteni düşey pozisyonda monte ediniz.
- Anteni metal bir hazne içine koymayınız.
- En iyi iletişim mesafesi her iki taraftaki antenlerin birbirini görmesi ile elde edilebilir.
- Herhangi bir obje veya metal bir engel iletişim mesafesini düşürecektir.
- Sinyal göndermeleri, gönderilen sinyallerin metal yüzeylerden, binalardan vb. gelen yansımalardan etkilenirler. Bu yanlış data alımlarına yolaçabilir
ARX-34 (UHF ASK DATA RECEIVER)
- Genel özellikleri
- 433.9 MHz. UHF bandında EN 300 220 uyumlu.
- Yüksek frekans kararlılığı
- Düşük akım sarfiyatı ile pilli uygulamar için idealdir.
Şekil 2.23 RF Alıcı

- Uygulama Alanları
- Uzaktan kontrol sistemleri
- Güvenlik amaçlı alarm sistemleri
- Oyuncaklar
Genel Açıklamalar : ARX-34 (UHF ASK data receiver) modül, kısa mesafe erişimli telsiz cihazlarının temel standartları ile kurma ve kullanma esasları hakkında yönetmelik (TGM-STK-001) ‘in 433-434MHz. ISM bandı ile ilgili bölümünü kapsayacak şekilde tasarlanmıştır. ARX-34 kısa mesafeli uzaktan kontrol uygulamaları için düşük fiyatı nedeniyle ideal bir çözümdür. Modülün anten haricinde herhangi bir rf komponente ihtiyacı olmadan pcb montajına uygun tasarlanmıştır. Basit bir kablo kullanılarak anten bağlantısı yapılabilir.
Şekil 2.24 RF Alıcı Pin Ölçüleri

Tablo 2.6 Pin Özellikleri

Tablo 2.7 Teknik Özellikleri

Besleme Voltajı : ARX-34 içerisinde bir voltaj regülatorü bulunmamaktadır. Tasarım pil kullanımı düşünülerek yapılmıştır. Bu nedenle besleme voltajında belirtilen değerlere dikkat edilmelidir. Modül belirtilen değerlerin altında bir besleme yapıldığında kararsız çalışacaktır. Besleme voltajı +5 Volt DC ve tapraklama GND baglantısı belirtilen değerlerin üzerinde veya ters olursa, modülde kalıcı tahribatlara yol açılabilir.
Düşük akım sarfiyatlarının sağlanabilmesi için modül içerisine ters polarizasyondan koruyacak bir devre konulmamıstır. Besleme voltajında çalışma sürecinde ±100 mV değişimlerin üzerindeki değişimler modülün kararsız çalışmasına neden olur. Besleme devresinde regülator IC kullanılması önerilir.
Data Format : Modül ‘de, digital data çıkışı için DOUT pini bulunur. DOUT pini RF ten alınan sinyallerin demodüle edilerek verildiği çıkıştır
Anten : Verimli data transferi ve alımı için gerekli en önemli iki nokta iyi bir anten ve doğru RF topraklama seçilmesidir. Anten olmadan datanın uzun mesafelere gönderilmesi mümkün değildir. Modül basit bir anten bağlantı pinine sahiptir. Uygun bir UHF anten doğrudan bu pine bağlanabilir. ARX-34 modülüne bağlanabilecek en basit anten 17.3cm uzunluğundaki bir kablonun anten girişine lehimlenmesidir. Anteni, modülden uzak bir yere bağlamanız gerekiyorsa 50 Ohm Coax anten kablosu kullanmanız gerekmektedir. Anten kablosunun topraklaması, modülün anten girişine yakın bir yerden yapılmalıdır.
- Anten 50 ohm empedanslı olmalıdır.
- Lambda/4 whip anten boyu 433 MHz. için yaklaşık 17.3 cm ‘dir.
- Anteni modül dik gelecek şekilde yukarıya veya aşağıya doğru monte ediniz.
- Anteni metal bir hazne içine koymayınız.
- İnsan vücudu metal objeler gibi etkiler gösterebilirler. Taşınabilir alıcı veya vericiler vücuttan uzak bir şekilde elde tutulmalıdır.
- En iyi iletişim mesafesi her iki taraftaki antenlerin birbirini görmesi ile elde edilebilir.
- Herhangi bir obje veya metal bir engel iletişim mesafesini düşürecektir.
- Sinyal göndermeleri, gönderilen sinyallerin metal yüzeylerden, binalardan vb. gelen yansımalardan etkilenirler. Bu yanlış data alımlarına yolaçabilir.
MAX232
Bilgisayar seri portlarının kullandığı RS232 sinyallerinin elektriksel özelliği, 5 Volt “lojik 1” ve 0 Volt “lojik 0” değerine karşılık gelen standart TTL mantığına benzememektedir. RS232 ‘de -12 Volt “lojik 1” , +12 Volt “lojik 0” değerine karşılık gelir. Bu özellik daha uzun mesafeli kablolarda, güçlendirme gerektirmeden iletişim sağlar.
RS232 ile birlikte çalışan birçok devrede bu voltaj farkını dengeleyici ek yongalar kullanılır. Bunlardan en yaygın olanı MAXIM firmasının ürettiği MAX232 sürücüsüdür.MAX232 gerilim seviye dönüştürücüsüdür.RS232 +- 12 V kullandığından MAX232 bunu mikroişlemcinin çalıştığı 5 V ya da 3,3 V ‘a dönüştürerek uyumu sağlar.Bu entegrenin bacak bağıntıları ve iç yapısı Şekil 2.25 ‘te gösterilmiştir
Şekil 2.25 MAX232 Entegresinin Bacak Bağlantıları ve İç Yapısı

RS-232
Tanım : Seri asenkron olarak gönderilen verinin alınması veya iletilmesini gerçekleştiren cihazlar arasında bu tür haberleşmenin sağlanabilmesi için geliştirilen bir standarttır.
RS-232 ‘nin Doğuşu ve Gelişimi :Seri port, bilgisayara diğer aygıtların bağlandığı, seri iletişim için tasarlanmış fiziksel bir ara yüzdür. Kişisel bilgisayarların tarihi boyunca terminaller veya modemler gibi cihazlar ile bilgisayarlar arasındaki veri transferi çoğunlukla seri bağlantı noktaları üzerinden sağlanmıştır. Fare, klavye ve diğer çevre birimleri de bu yolla bilgisayara bağlanmaktadır. İlk olarak 1962 yılında çıkmıştır ve onun üçüncü versiyonu 1969 yılında RS-232C olarak adlandırılmıştır. RS-232C standardı ise RS-232 C üzerinde genişletme yapmak için 1987 yılında çıkmıştır. RS232 D standardı aynı zamanda EIA-232-D olarak da bilinir.
Seri port üzerinden haberleşmeyi, “UART” adı verilen bir tümleşik devre sağlamaktadır. Bilgisayarlarda kullanılan seri port genellikle RS232 standardında üretilmektedir. Değişik üreticiler tarafından yapılmış veri haberleşme cihazlarının uyumluluğunu sağlamak amacı ile Electronic Industries Assosiation (EIA) tarafından 1960 yılında RS232 olarak adlandırılan standart belirlenmiştir. RS232 standardı lojik ‘0’ ve lojik ‘1’ gerilim seviyeleri farklı olmak üzere RS232A, RS232B ve RS232C isimlendirilen üç gruba ayrılmıştır. Kişisel bilgisayarlarda, RS232C yaygın olarak kullanılmaktadır. Lojik gerilim sevileri; lojik ‘1’ için -3V ile -12V, lojik ‘0’ için +3V ile +12V arasında belirlenmiştir
Şekil 2.26 RS232 DB-9 konnektör

Başlangıçta RS232 standardı 25 pin ile tanımlanmıştı. Modern bilgisayarlarda ihtiyaç duyulmayan pinler çıkartılarak, IBM tarafından Şekil 2.26 ‘da görülen konnektöre sahip DB-9 standardı geliştirilmiştir. Seri port pin numaraları ve ingilizce tanımlamaları tablo 2.7 ‘da verilmiştir. DCD pini, bağlantı yapılacak olan cihazın veri iletişimine hazır olup olmadığını ya da bu cihazın iletişim için çalışıp çalışmadığını denetler
Tablo 2.8 DB-9 pin tanımlamaları

RxD ve TxD pinleri data alım ve gönderim pinleri olarak tanımlanmıştır. Bilgisayara seri porttan bağlı olan aygıt tarafından gönderilen seri datanın alındığı pin, RxD olarak tanımlanmıştır. TxD pini ise bilgisayardan karşı aygıta seri verinin gönderilmesi için kullanılmaktadır. DTR pininden, gönderilecek datanın hazır olduğunu karşı aygıta bildiren sinyal gönderilir. DSR pini ise aygıt tarafından gönderilecek olan datanın hazır olduğunu, bilgisayara bildiren sinyal gönderir. SG pini, mantıksal toprak pinidir. Diğer sinyallerin lojik gerilim seviyeleri bu pinin referansına bağlı olarak belirlenir. RTS pini, bilgisayardan aygıta, data gönderme isteği olduğunu belirtir. CTS pini ise seri portun veriyi göndermek için hazır olup olmadığını belirler.
Seri Port Bit Formatı: Asenkron iletimlerde linkte saat hattı olmaz. Çünkü her uç kendi sinyalini sunmaktadır. Ancak, uçların saat frekanslarında anlaşmaları ve saatlerin de uyumlu olmaları gerekir. İletilen her byte ‘ta saatleri eşlemek üzere bir Start biti ve iletimin bittiğini bildirmek üzere bir veya daha fazla Stop biti bulunur. Bir asenkron transfer çeşitli formatlarda olabilir. Bunların en yaygını 8-N-1 ‘dir. Bu formatta, gönderici cihaz her bir byte ‘ı, 1 Start bitini takiben 0 nolu bitten (en az anlamlı LSB : least significant bit) başlayarak 8 veri biti ve 1 adet Stop biti olarak yollar.
8-N-1 ifadesindeki N, iletimde parite biti kullanılmadığını anlatır. Diğer formatlarda hata kontrolünün basit bir formu olarak bir parite biti bulunur. Parite, çift, tek, İz, ya da Boşluk (Even, Odd, Mark, Space) olabilir. Tablo 2.8 ‘de çift ve tek parite durumları gösterilmektedir.
Çift parite, parite bitinin, kendindeki ve veri bitlerindek 1 ‘lerin toplam sayısının çift olmasını sağlayacak şekilde set edildiğini anlatır. Tek parite ise aynı şekilde 1 ‘lerin toplam sayısının tek olmasını sağlayacak şekilde set edildiğini anlatır. Örneğin 7-E-1 formatını ele alalım. Gönderici 1 Start bitini takiben 7 veri biti, 1 parite biti ve 1 Stop biti yollar. Her iki ucun da formatta uzlaşmış olmaları şarttır.
Alıcı, veriyi yoklar ve sonucun beklenen değer olmaması durumunda göndericiye hata olduğunu bildirir. Çift paritede, veri bitlerindekilerle birlikte parite bitinde çift sayıda 0 bulunur. Tek paritede ise tek sayıda 0 vardır. 8-N-1 formatı, şekil 2.27 ‘de gösterilmişti. Verici boşken çıkışı lojik 1 ‘dir. Çıkış, 1- bit genişliğinde lojik 0 göndererek gönderimi başlatır. Bu, Start bitidir. 1- bit genişlik 300 bps ‘de 3.3 milisaniye, 9600 bps ‘de 0.1 milisaniyedir
Tablo 2.9 Parite Bitleri ve Data Bitleri (Axelson, 2000)

Şekil 2.27 Asenkron Bilgi Gönderme Protokolü

Start bitinin ardından, 8 adet veri biti, 0 nolu bitten başlayarak, sırayla gönderilir. Bunu göndericinin yolladığı bir lojik 1 takip eder, ki Stop bitidir. Böylece çıkış yine, en azından bir bitin genişliği boyunca lojik 1 olur. Verici ancak bundan sonra yeni bir byte göndereceğini bildirmek üzere bir Start biti yollayabilir.
Alıcı uçta lojik 1 ‘den start bitini belirten lojik 0 ‘a geçiş bir byte geldiğini belirtir ve izleyen bitleri algılamak üzere zamanlamayı tayin eder. Alıcı her bitin lojik değerini (durumunu) bitin ortasına yakın bir yerde ölçer. Bu, gönderim ve alım saatlerinin uyuşmazlığı halinde bile alıcının hatasız bir şekilde okumasını sağlar. RS-232 gibi bazı arabirimler tersinmiş gerilimlerle karar verirler. Stop biti yerine negatif, start biti yerine de pozitif voltaj kullanılır.
Şekil 2.28 Verici ve Alıcı Saat Sinyalleri (Axelson, 2000)

UART ise bit frekansının 16 katına eşit alıcı saat sinyali kullanır. Örneğin veri hızı 300 bps ise, alıcı saati 4800 bps olmalıdır.şekil 2.28 ‘de görüldüğü gibi Start bitini bildiren bir geçiş algılandıktan sonra UART, bitin geçmesi için 16 saat çevrimi bekler. Ardından 0 nolu biti ortasında okuyabilmek için 8 çevrim daha bekler. Bundan sonra, her 16 çevrimde bir gelen biti okuyarak devam eder.
Gönderen ve alan cihazların saat darbeleri birbirlerine tam olarak uymuyorsa, alıcı, izleyen her bir biti, aynı kenara bir öncekinden daha yakın bir yerde okuyacaktır. 10-bitlik bir word ‘ün hatasız olarak okunabilmesi için alıcıyla vericinin saat darbeleri arasındaki farkın %3 ‘ten fazla olmaması gerekir. Çünkü, fazla olması halinde, alıcının son bitleri okumaya çalıştığı sırada zamanlama bozulmuş olacak ve alıcı , bitleri ya henüz başlamadan ya da bittikten sonra okur duruma düşecektir.
Bununla birlikte, her bir word ‘ün, darbeleri senkronize eden yeni bir Start bitiyle başlaması nedeniyle, darbelerdeki bu kayma, bir word uzunluğundaki aralık (sync) ile sınırlı kalacaktır. Asenkron arabirimlerde zamanlamanın böylesine hassasiyet taşıması, kararlı bir zamanlama referansı gerektirmektedir. Bu nedenle arabirimler çoğunlukla bir kristal veya seramik resonatörle kontrol edilirler. En iyi sonucu alabilmek için, referans frekansının, alıcı tarafındaki saatin standart bit hızlarında kullanıldığı frekanslarla tam bölünebilir olması gerekir. PC ‘lerde standart UART saat frekansı 1.8432 MHz ‘tir. 16 ile bölümünde elde edilen 115,200 bps, UART ‘ın desteklediği en yüksek hızdır
RS-232 Özellikleri
RS-232 ‘nin bazı yönlerden avantajları vardır. Avantajları şunlardır:
Her PC ‘de bir ve daha fazla bulunur. Yeni PC ‘ler USB gibi arabirimleri desteklemektedir. Fakat RS-232 USB ‘nin yapamadığı şeyleri yapar.
Mikrokontrolörde, arabirim yongaları bir 5 V seri portu RS-232 ye çevirebilirler.
Linkler 50 ya da 100 feet uzunlukta olabilir. Çoğu cihazlardaki arabirimler uzun mesafelere yönelik değildirler. USB linkler 16 feet olabilmektedirler. PC paralel arabirimi 10-15 feet, IEEE-1284 tip B sürücülerle ise 30 feet olabilmektedir. Oysa RS 232 çok daha uzun kablolarla da iş görebilir. Her RS-232 bir modeme bağlanırsa, bu durumda telefon şebekesini tüm dünyaya iletim amacıyla kullanmak mümkündür.
2- yollu bir link için sadece üç tele ihtiyaç vardır. Paralel linkte sekiz adet veri hattıyla iki ve daha fazla kontrol sinyali ve birkaç da toprak hattı bulunur.
Kablolama maliyeti yanında bir de konektör sorunu vardır.
Dezavantajları ise şunlardır:
Linkin karşı ucu paralel veri gerektiriyorsa, gelen veriyi paralel veriye dönüştürmek zorunda kalacaktır. Ancak bu sorun bir UART kullanarak kolaylıkla çözülebilir.
Çok kullanışlı olmaları nedeniyle boş seri portu bulmak neredeyse imkansız gibidir. PC ‘lerde çok sayıda seri port bulunur. Ancak sistem bunların her biri için bir kesme istek hattı tahsis edememektedir. Bir çok mikrokontrolörde donanımda yalnızca bir tane seri port bulunmaktadır.
Bir linkte ikiden fazla cihaz bulunmayabilir.
Belirlenen en yüksek hız 20,000 bps (bit per second) ‘dir. Oysa, genellikle kısa linklerde, bunun üzerine çıkan, pek çok arabirim bulunmaktadır.
Çok uzun linklerde farklı arabirim gerekebilir.
DC Motorlar
Doğru Akım motorları yüksek verimleri , basit kumanda üniteleri ile değişken yükler altında hız ayarı imkanı sağlarlar. Motorlarda hassas devir kontrolü, iş kalitesinin yükselmesine, verimin artmasına ve üretim üzerinde daha fazla kontrol sağlanmasına yol açmaktadır. Son yıllar da hızla gelişen elektronik teknolojisi sayesinde yapılan devreler ile; Doğru Akım motorlarında armatür gerilimini değiştirerek deviri, armatür akımını değiştirerek torku ayarlamak mümkündür. DC Şönt Motorlarda moment sabittir.
Devir ayarı kademesiz ve homojen olarak elde edilebilir. Yük değişimlerinde tako jenaratör geri beslemesi sayesinde devirlerde yüksek hassasiyet sağlanabilir. Bu sayede sabit hat hızları elde edilir. Ayrıca DC Motorlar senkron kumanda sistemlerine olanak vermektedir. DC Motorlar ile uzaktan devir ve tork ayarı yapmak mümkün iken, birçok sistemi seri ve paralel çalıştırmak, sabit çekmeli sarmalar yapmak da mümkündür.
İlk doğru akım motorları katı gövde ve komitasyon kutupları ile tam doğrultulmuş, dalgasız bir Doğru Akım kaynağıyla ile çalışacak şekilde yapılmaktaydı. Günümüzde böyle bir kaynağı bulmak imkansız hale gelmiş ve gerekli DC. gerilimi tristör kontrolü ile doğrultarak Alternatif Akım kaynaklarından elde edilmek zorunda kalınmıştır. Bu şekilde sağlanan DC. gerilimler içinde bulunan harmonikler, manyetik devreler içinde edi akımları kayıplarına neden olduğu kadar, sargıların da, daha fazla ısınmasına yol açıp çok önemli komitasyon güçlüklerine sebep vermekte idi.
Bu yüzden 1966 yılında dilimli sac gövdeli motor serileri geliştirilmiştir. Ana ve yardımcı kutuplar ile tüm gövde tamamen dilimlenmiş saclardan yapılmıştır.Tek parça katı gövdelerde harmoniklerden dolayı ortaya çıkan edi akımı kayıpları dilimli sac gövdelerde büyük ölçüde yok edilmiştir. Daha da önemlisi bu tasarımla, komitasyon ve dinamik davranış iyileştirildiği için DC. motorlar kontrollere daha iyi cevap verebilir hale gelmiştir.
Günümüzde DC. motorlarda birçok bakır tel bobin, silindirik lamine silisli sac üzerine açılmış ankuşlar içerisine yerleştirilmiş ve uçları kollektöre (birbirinden mika ile yalıtılmış, % 0.8 gümüş katkılı elektrolitik bakırdan yapılmış,silindirik malzeme) irtibatlandırılmıştır. Konu edilen kollektöre de fırçalar basmaktadır. Fırça (kömür) üzerinden bobinlere akım beslemesi yapıldığında ve bu iletkenlerin de manyetik alan içerisinde kalması halinde iletkenler kuvvetlerin etkisine maruz kalmaktadır. Tüm bunların takibende bir tork oluşacaktır
Şekil 2.30 İçinden Akım Geçen İletkenin Kutuplar İçerisindeki Hareketi

Micro Code Studio
Micro code studio ‘da program yazılmadan önce bazı parametrelerin ayarlanması gerekiyor. Bunların başında PBPro klasörünün micro code studio ‘ya gösterilmesi gerekmektedir. Bu iş için micro code studio ’de view mönüsünden pic basic options alt menüsü seçilir. Bu mönüde PBP ‘nin yeri programa gösterilir. Aynı şekilde programlayıcının yeri ve parametreleri de bu seçenekte micro code studio ‘ya gösterilir.
Bu işlemlerin yapıldıktan sonar pic için yazılıma başlayabiliriz. Programı yazmayı tamamladıktan sonra ekranın üst tarafında bulunan derle tuşuna tıklanır ise yazmış olduğunuz derlenir ve BAS uzantılı dosyanızın yer aldığı klasör içine aynı isimle ancak hex uzantılı olarak kayıt edilir. Dosyanın derlendikten sonra Pic ’e yazılması için programlayıcıyı çalıştırmak gerekir.
Pic ’e yazma ve Pic den okuma işlemlerinde en çok kullanılan program olan IC-Prog hakkında da biraz bilgi vermek isterim. IC-Prog hem seri porttan hem de paralel porttan çalışan programlayıcılarla uyumlu bir programlayıcıdır. Kullanımı son derece basittir. Gerekli parametreler ayarlanıp donanım seçimi de doğru yapılırsa sorunsuz olarak çalışacaktır. Programı kullanırken dikkat edilmesi gereken en önemli nokta programlama yaparken veya programlama yaptıktan sonra doğrulama işleminin yaptırılmasıdır.
Hatalı yapılan bir işlemi kontrol edilmez ise hatalı olup olmadığını anlayamayacağız. Doğrulama işlemini aktif yaparak programlama sırasında oluşan bir hata var ise bunu IC-Prog bize gösterecektir.. Bu nedenle Seçenekler mönüsünden Programlanıyor alt mönüsünde bulunan check box ‘ların ikisini de veya en az birini işaretlemekte fayda vardır.
Pic Basic Pro Kurulumu
Micro code studio pic basic pro kodlarını kullanan bir editördür. Pic basic pro ve micro code studio birbirinden bağımsız olarak çalışamamaktadır. Pic basic pro sadece programlama ve derleme kurallarını barındıran txt dosyalarından oluşan ve bu text dosyalarını kontrol eden ufak bir yazılım içermektedir. Pic basic pro ise yapılacak basic yazılımın yazıldığı ve görsel olarak hataları ve fonksiyonları görebileceğimiz bir arayüz programı olarak düşünebiliriz.
İkisinin birlikte çalışması için pic basic pro yazım kurallarının micro code studio içine aktarılması gerekmektedir. Öncelikle pbp kurulumundan bahsedelim. Pic basic pro dosyalarının bulunduğu klasörü C: sürücüsün içine atınız ve bu işlem ile pbp kurulumu bitmiş bulunmaktadır. Bu aşamadan sonar pic basic pro ve micro code studio ilişkilendirmesi gerekmektedir.
Pic Basic Pro Ve MicroCode Studio İlişkilendirmesi:
1) İlk olarak önceden kurmuş olduğumuz MicroCode Studio programını çalıştırınız.
2) Programın üst mönüsünde bulunan View seçeneği altındaki Compile and Program Options yazılı bölüme tıklayınız. Şekil 3.11 ‘de ilgili bölüm gösterilmiştir.
Şekil 3.11 PBPro ‘nun Yüklenmesi

3) Bu aşamadan sonra karşımıza çıkan küçük penceredeki Compiler mönüsü altındaki Find Manually yazan butona tıklamak ve C sürücüsünün altında oluşturduğumuz pic basic pro klasörünü seçmektir. Seçimden sonra klasör gösterimi c:\pbp olmalıdır. Bu aşamalardan sonra alt bölümdeki OK tuşuna basarak ilişkilendirmeyi bitiriyoruz. Artık microcode studio programını pbp kodlama desteği ile rahatlıkla kullanabiliriz.
Karşılaşılan Zorluklar
Motorun hızına göre, labirentte bir sonraki durakta tutma işleminde problemler yaşanmaktadır. Bunu engellemek için çizgi izleyen robot mantığından yararlanılmıştır.
CNY70 algılama sensörlerinin üretmiş olduğu sinyallerin PIC tarafından algılanmasında sorunlarla karşılaştık. Bu sorunu ilk başta 74HC14 Schmit Trigger entegresi ile çözmeye çalıştık. Bu entegre ile bu sorunu belirli ölçülerde giderdik. Ancak bazı noktalarda bize istediğimiz sonucu üretememekteydi. Bizde çözüm olarak LM324 Op-Amp kullanarak, fark devresi ile farklı yüksekliklerdeki sensör konumlarına göre, referans aldığımız değeri, bir gerilim bölücü ile besleyerek, CNY70 algılayıcılarında istediğimiz yükseklikte algılama işlemini gerçekleştirmiş oldu.
RF haberleşmesi sırasında gönderilen bilgilerin PIC ram bölgesindeki yığılmalar nedeniyle bir sonraki adımda gönderilecek olan RF sinyalinin PIC tarafından alınmasında gecikmeler yaşanmaktaydı. Bu sorunu yazılımsal olarak ram bölgesini boşaltarak aşılmıştır.
DC motorlara bağlı bulunan tekerleklerin hareketi doğrudan motor milinden alındığında kalkınma problemi ortaya çıkmaktaydı. Bu sorun motor mili ile tekerlek arasına dişli yapısının yerleştirilmesiyle aşıldı.
Tek taraflı RF haberleşmesi kullanmak yerine çift taraflı RF haberleşmesi kullanılarak bilgisayar yazılımında robotun konum bilgisinin okunması sırasındaki gecikmelerin önüne geçilebilir.
DC motor yerine step motor kullanılarak adım açılarının daha doğru elde edilmesiyle sensör katına olan ihtiyacın ortadan kaldırılması sağlanabilir.
Haberleşmenin RF modül olmaksızın seri port veya usb port üzerinden kablo yardımıyla gerçekleştirilmesi sistemi yazılım ve donanım yönünden daha basit bir yapıya kavuşturabilir.
RF haberleşme yerine bluetooth veya infrared haberleşme protokolleri kullanılarak RF haberleşmedeki aksaklıkların önüne geçilebilir.
Kaynaklar
1-) http://www.turk-cad.com/content/view/1191/233
2-) http://www.esnips.com/doc/81168639-1417-4bf8-aceb-f70fb3246cc /PICasm_Tuerk_e
3-) http://dondurma.ksu.edu.tr/Library/e-tez/fbe/T00513/muratgormemis_tez.pdf
4-) http://www.emo.org.tr/resimler/ekler/e0e944a35fe7e54_ek.pdf
5-) http://www.udea.com.tr/1/ARX-34%20KILAVUZ.pdf
6-) http://www.udea.com.tr/1/ATX-34S%20KILAVUZ.pdf
7-) http://www.udea.com.tr/1/UDEA_RFconsept_Turkish_v08.ppt
😎 http://msdn.microsoft.com/en-us/library
9-) http://hyperphysics.phy-astr.gsu.edu/Hbase/magnetic/motdc.html
10-) http://www.emo.org.tr/resimler/ekler/51c69da77c98612_ek.pdf
11-) http://www.coolmagnetman.com/magdcmot.htm
Şifre-Pass: 320volt.com
Yayım tarihi: 2009/01/08 Etiketler: ARX-34, ATX34, cny70, dc motor, l293, labirent robotu, optik sensör, rf alıcı, rf modül, rf verici, robot projeleri robotlar, robot yapımı, rs232, seri iletişim
Radyo’nun mucidi Tesla’dır…
Çok güzel, anlatım için teşekkürler.