Hedef bulan robot projesinde Robotlar hakkında bilgi, PIC16F877A kullanımı, rf haberleşme rf alıcı ve verici katları, GP2YOD340 sensör bilgileri dc motor, l298, proteus isis devre simülasyonu ve daha bir çok faydalı bilgi robot projesinin anlatımında yer alıyor.

Hazırlayanlar: Serkan YORULMAZ , Ahmet YILMAZ – Hazırlayan emeği geçen kişilere teşekkürler.
![]()

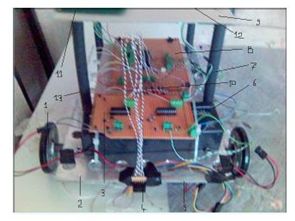
İnsan hayatını kolaylaştırmaya yönelik gelişen teknoloji, robotların da geliştirilmeye ve gerekli alanlarda kullanılmaya başlanmasıyla etkisini bir kez daha ciddi anlamda göstermiştir.Robotik çalışmalar ilerledikçe, robot uygulamalarının ne kadar çok uygulama alanı için gerekli ve uygun olabileceği anlaşılmıştır Engellere çarpmadan,koordinatları bilinen hedefe ulaşan robot projesi,haritalaması yapılmış bir bölgede, istenen hedefe insan müdahalesi olmadan, ulaşmayı amaçlamaktadır.
Robot görevini gerçekleştirirken,karşılaşacağı engelleri algılayıp,hedeften sapmayacak bir şekilde aşarak, yoluna devam edecektir.Hedefi bulduğunda ise başka bir işlem yapmadan duracaktır. Projede esas amaç hedefin bulunmasıdır.Hedefe ulaşmak için hedefin bulunduğu alan matrissel bir düzlem olarak düşünülmüş ve robotun hareketi koordinat bilgileriyle kontrol edilmiştir.

Bu proje bir gezgin robot uygulamasıdır.Projenin daha iyi anlaşılması için öncelikle robotlar hakkında genel bilgiler , robotların tarihçesi ve gezgin robot uygulamaları hakkında bilgiler verilecektir.Daha sonra projede kullanılan elektriksel ve mekaniksel elemanlar teker teker ele alınacak ve son olarak yazılım ve simülasyon çalışmaları hakkında bilgiler verilecektir
Proje sonunda belirtilen konularda bilgiler edinilmiştir:
PIC16F877A mikrodenetleyicisi kontrolünde bir sistem tasarımı ve gerçeklenmesi
- DC motor kontrolü GP2Y0D340< uzaklık sensörü ile algılayıcı kullanımı
- Likit kristalli ekran kullanımı
- Encoder ile gidilen yol bilgisinin elde edilmesi
- RF modül ile haberleşme
- Entegre temini ve kullanımı
- Mekanik tasarım yapma
- Pertinaks üzerine lehimleme ile devre kurma
- Baskı devre çizimi
- Algoritma çizimi,program yazma ve programlayıcı kullanımı
- Robotların Tarihsel Gelişimi, GRobot Uygulamaları
- PIC16F877A Mikrodenetleyicisi, Özellikleri
- PIC16F877A’nın Portları
- DC Motorun Çalışma Prensibi
- DC Motor Hız Kontrol Yöntemleri
- Analog Kontrol, Sayısal Kontrol
- JAPAN DME34BE506 DC Motor
- L293E Motor Sürücü Entegresi
- SHARP GP2YOD340 Uzaklık Sensörü
- HD4470 2X16 Likit Kristalli Ekran
- ARX-34 RF Alıcı , ATX-34 RF Verici
- Mekanik Kısım, L293E Motor Sürme Devresi
- SHARP GP2Y0D340 Uzaklık Çıkış Grafiği
- HD44780 2 X 16 Likit Kristal Ekran
- ATX34 RF Alıcı, ATX34 RF Verici
- Omni-directional Tekerlek, Serbest tekerlek
- Ön Tekerlek, Gövde ve Tekerlekler
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/07/10 Etiketler: GP2Y0D340, Likit kristal, mekanik, microchip pic projeleri, PIC16F877A, Rf, robot projeleri robotlar, robot yapımı
yazının başında belirttiğim gibi Hazırlayanlar: Serkan YORULMAZ , Ahmet YILMAZ 320volt sitesine özel olarak hazırlanmış bir proje değil
pic in c dilinde kodlarını bulan var mı