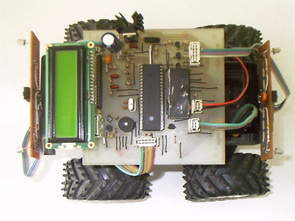
Hazırlayan: M. Kürşat YALÇIN – Emeği geçen Kişilere Teşekkürler Bu tez çalışmasının amacı genel amaçlı bir mobil robotun tasarlanması ve gerçekleştirilmesidir. Gerçekleştirilen mobil robot ilerlerlediği yol üzerindeki cisimleri algılayabilecek ve bu cisimlere çarpmadan yoluna devam edebilecek şekilde tasarlanmıştır. Mobil robot platformu oluşturmak için bir model araba kullanılmıştır. Bu model arabada iki adet motor bulunmaktadır. Motorlardan bir tanesi ileri ve geri hareketi sağlamakta diğeri ise model arabanın ilerleme yönünü değiştirmek üzere sağa veya sola dönebilmektedir.

Mobil robotun bütün fonksiyonlarını kontrol etmek amacıyla Microchip firmasının üretmiş olduğu bir mikrodenetleyici olan PIC16F877 kullanılmıştır. Gerçekleştirilen mobil robotun cisimleri algılaması kızılötesi alıcı-verici çiftler kullanılarak sağlanmıştır. Mobil robota kullanıcı tarafından komut verilebilmesi için CREATIVE firmasına ait hazır bir kızılötesi kumanda kullanılmıştır.
Bu kumandayla ilgili detaylı bilgi teze ek olarak sunulmuştur. Kullanıcı bu kumanda sayesinde robotu elle kontrol edebilmenin yanı sıra robotun çalışmasıyla ilgili bir takım bilgileri görebilmekte ve gerekirse müdahale edebilmektedir. Mobil robotun kullanıcıya bilgi verebilmesi için bir 2×16 LCD modülü kullanılmıştır.
In this thesis a general purpose mobile mobot is designed and implemented.
In general, robots are used in such applications that are dangerous or difficult to accomplish by human beings. Examples of such applications are laboratories in which radioactive materials are being used, an automotive production factory or a Mars journey. In order to implement the mobile robot, designed in this work, a model car is used. The necessary electronic hardware for the mobile robot are placed on the model car. The mobile robot senses obstacles on its way and avoids them. To implement this function infrared transmitter-receiver pairs are used. To control the whole mobile robot system a PIC16F877 microcontroller is used. A 2×16 LCD module is used to give information to the user when required.


Gerçekleştirilen mobil robotun tüm işlevleri bir PIC16F877 mikrodenetleyicisi ile kontrol edilmektedir. Mobil robot için gerçekleştirilen yazılım Ek-A’da verilmiştir. Yazılım geliştirme ortamı olarak Microchip firmasının internet sitesinden ücretsiz olarak indirilebilen MPLAB IDE programı kullanılmıştır. Bu programla yazılıp derlenen kodlar yine Microchip firmasının geliştirdiği ve kullandığımız mikrodenetleyicinin de desteklediği ICSP (In Circuit Serial Programming, Devre içi seri programlama) sayesinde iki adet pinle mikrodenetleyiciye transfer edilebilmektedir. Bu transfer işleminde ise program olarak ICPROG kullanılmıştır.
Tez çalışmasının ikinci bölümünde robotlarla ilgili tarihi gelişimden bahsedilmiştir. Aynı zamanda robotların genel özellikleriyle birlikte robotlarda kullanılan elektronik sistemler üzerinde durulmuştur.
Üçüncü bölümde ise gerçekleştirilen mobil robotun gerçekleştirilme aşamaları görülmektedir. Bu bölümde öncelikle mobil robot için gereken fiziksel bir platform seçiminden bahsedilmiş ve uygun bir platform seçilmiştir. Daha sonra ise her elektronik devrenin çalışması için gerekli olan enerji kaynağı bataryalara değinilmiştir. Ayrıca bataryaları şarj eden bir de devre verilmiştir. Mobil robotun yolu üzerindeki cisimleri
algılaması için gereken sensörden ve devresinden bahsedilmiştir. Ayrıca program geliştirme işlemi için kullanılan MPLAB IDE programı ve kodları mikrodenetleyiciye yüklemek üzere kullanılan ICPROG programı özetle anlatılmıştır.




Mobil Robotların Genel Yapısı
Bir bilgisayar simülasyonunu aşıp gerçek ortamla iletişim halinde olan bir makine yapılmak isteniyorsa bu koşulun getirdiği, bir bakıma robot çalışmalarına gerçek önemini kazandıran faktör olan gürültü karşımıza çıkmaktadır.
Gürültü, sensörlerin ölçmeyi istediğiniz şeyi ancak bir yere kadar ölçebilmesinden kaynaklanıyor. Her sensör bir çözünürlüğe sahip ve dış dünyadaki sayılamayacak kadar çok etmen sensörlerin sürekli küçük hatalar yapmasına yol açıyor. Bir simülasyon ortamında bu gürültü ancak istatistiksel metotlarla gösterilebilir, ama örneğin ses sensörlerinin trafikte öfkeyle çalınan korna seslerini duymasının bilgisayar ortamında gerçekçi bir karşılığı yoktur.
Bu nedenle bir robot tasarlamak ve gerçekleştirmek çok boyutlu, zor bir kontrol
problemidir. Robotu oluşturan üç ana sistem birbirine uygun bir biçimde seçilmek ve hepsi
birlikte geliştirilmek durumundadır. Bu üç sistem şunlardır:
1 robotun ortam hakkında gerçek zamanlı bilgi edinmesi için kullanacağınız sensörler,
2 kontrolü sağlayan elektronik devre,
3 robota amacına yönelik fonksiyonları gerçekleştirmesi için yerleştirilen harekete geçiriciler, Ancak bu üç sistem birleştiğinde ortaya kendi başına hareket eden, bilgi toplayan, yapacağı işin niteliklerine göre donanmış bir robot çıkabilir.
İçindekiler
Tarihi Gelişim – Robot Algılaması – Robot Zekası – Mobil Robotların Genel Yapısı
Sensörler – Senörlerin kalitesi – Ölçme sınırları – Çözünürlük – Tekrarlanabilirlik
Doğrusallık – Anahtarlar ve dönüştürücüler – Temassız yakınlık sensörleri Kuvvet ve basınç dönüştürücüleri – Pozisyon Sensörleri – İşlem Ünitesi Hareket Geçiriciler (actuator) – Selenoidler ve tork motorları Elektrik motorları ve yapısı – Elektrik motorlarını tipleri – Motorların kontrolü DC motorların hız kontrolü – DC motorların durdurulması – Adım motorları Elektronik Donanım – Enerji – Engel sensörleri – Robot hızının ölçümü Kullanıcı arayüzü – Motorlara çalıştırılması – Yazılım – PIC mikrodenetleyicisi MPLAB IDE programı – ICPROG programı – Geliştirilen yazılımın kullanıcı arayüzü
Gerçekleştirilen mobil robotun blok şeması
Bir sıcaklık sensörünün ölçme sınırı ve doğrusallık hatası
Bir sıcaklık sensöründeki histerezis ve çözünürlük
Dijital bir sıcaklık sensöründe çözünürlük
Bir basınç sensöründeki eğrisellik
Anahtar çıkışı ile dönüştürücü çıkışının karşılaştırılması
Sınır anahtarlar
Hall etkisi sınır anahtarı
Endüktif yakınlık sensörleri
Kapasitif yakınlık sensörleri
Optik yakınlık sensörleri
Yay – tipli bir basınç sensörü
Gerginlik ölçerler ve kompanzasyon devresi
Pozisyon sensörü olarak anahtar dizlerinin kullanımı
Potansiyometrik pozisyon sensörleri
Yansıyan dalga formu sensörleri
Artımsal optik kodlayıcı
Mutlak optik kodlayıcı
Manyetik sensör
Doppler etkisi
Elektromanyetik tork motoru
Elektrik motorlarının yapısı
Motorların sınıflandırılması
Araba biçimli mobil robot platformları
Çift tahrikli mobil robot platformu
Mobil robotun NiCd bataryası için şarj cihazı
Darbe kod modülasyonlu sinyal
Darbe kod modülasyonlu sinyale kızılötesi alıcı sensörün tepkisi
Engel algılama sensörlerinin robot üzerindeki yerleşimi
Kızılötesi ledler ve kızılötesi alıcı entegreyle ilgili elektronik devre
Devir sayımında kullanılan elemanlar ve robot üzerindeki yerleşimi
Beyaz şeritlerin teker iç yüzeyindeki yerleşimi
CREATIVE firmasının tasarladığı kumanda
Kullanılan LCD Modül
Üretilen PWM sinyali
SN754410 entegresinin iç yapısı
İleri – geri motorunun tampon aracılığıyla PIC16F877’ye bağlantısı
Sağ – sol motorunun tampon aracılığıyla PIC16F877’ye bağlantısı
Gerçekleştirilen mobil robota ait devre şeması
PIC16F877 mikrodenetleyicisine ait blok şema
Simülasyon için gerekli işlemler
Yeni proje oluşturma
Oluşturulan projeye asm dosyası ekleme
ICPROG programı ilk defa çalıştırıldığında ekran görüntüsü
ICPROG programının ekran görüntüsü
PIC16F877’yi ICSP kullanarak programlamak için gereken devre
Mobil Robotun Kullanıcı Arayüzü için Menü Şeması
Mobil Robotun elle kumanda edilmesi için gereken tuşlar
Sensors – >Obstacle menüsü seçildiğindeki ekran görüntüsü
Sağ önde bir engel tespit edilirse ekran görüntüsü bu şekilde olur
Pidcheck menüsü seçildiği andaki ekran görüntüsü
Pidcheck menüsünde ayar tuşları
Pid katsayıları denenirken görülen ekran
Batarya ölçümünde ekran görüntüsü
Bazır açma/kapama esnasında ekran görüntüleri
Aydınlatma açma/kapama esnasında ekran görüntüleri
Tipik bir kızılötesi kumandanın blok şeması
(a) “010” bilgisine karşılık gelen NRZ veri
(b) “010” bilgisine karşılık gelen bit genişlik kodu
Bit genişlik kodlamasından sonra darbe kod modülasyonu
Uzaktan kumanda üzerindeki tuşlara karşılık gelen sayılar
Creative firmasının CD okuyucusu için üretmiş olduğu kızılötesi kumandasında
bulunan tuşların 32 bitlik karşılıkları
İki adet veri çerçevesinin ardından tekrar çerçevelerinin gönderilmesi
TSOP1238 fotomodülü ve blok şeması
TSOP1238 fotomodülünün giriş ve çıkış ilişkisi
TSOP1238 fotomodülüne ait katalog bilgisi
SN754410 entegresine ait katalog bilgisi
QSE156 optik elemanına ait katalog bilgisi
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/09/28 Etiketler: kumanda, kumandalı robot, lcd devreleri, maket robot, mekanik, microchip pic projeleri, mobil robot, model araba, motor, mplab, PIC16F877 örnekleri, robot araba, sensör
merhabalar..cumhuriyet üniverstesinde elektrik 2. sınıf öğrencisiyim.bitirme ödevi olrak bu projeyi seçtim..birçok devre elamanlarını buldum ama baskı devresini hazırlamakta zorlanıyorum.daha önceden bi tecrübem yok.yardımcı olabilirmisnz.teşekkürler…
merhaba. evet devreyle ılgılı bı kaç kucuk sorun var. öncelıkle projenn çok guzl oldunu dusunuyorum sıteye kazandıranlara tsk ederım. bu devrede sensör1, sensör2 ve devir sensörü olan 3 parçanın hangı parça olduğu yazmıyor sadece sensör dıyor ama hangi sensör olduğu belli değil acaba bu konuda yardımcı olabılırmısınız.
yahya, kardeşim bende bu prje uzerıne çalışıyorum çizim bitince mail atabılırım baskı devresini
teşekkurler