PI ve PID Kontrolörleri ile Tasarımı hakkında faydalı bilgilerin bulunduğu 3 Adet Döküman bulunmakta aşağıda bilgilerden kısa örnekler verilmiştir. Emeği geçen hazırlayan kişilere teşekkürler.

1: PID Kontrol Hazırlayan : Mehmet POYRAZ Emeği geçen kişilere Teşekkürler
1. Otomatik Kontrol Sistemlerine Geçiş
Kontrol işlemlerine günlük hayatın hemen her anında rastlanır. Bilinçli ya da bilinçsiz olarak kontrol işlemleri uygular, kontrol işlemleri içinde davranırız. Kontrol işlemlerinin birçoğu otomatik olarak insan girişimi olmadan gerçekleştirilir. Örneğin merdiven otomatiği, ilgili alanlardaki aydınlatma sisteminin çalışmasını ve belirli bir süre sonra kendi kendine kapanmasını sağlar.
Termosifon, şofben ya da fırın sıcaklığının belirli bir değer etrafında tutulması, su basıncının hidrofor sistemleri yardımıyla ayarlanması ve yine depo seviyelerinin şamandıralı açma-kapama vanaları ile kontrolü günlük hayatta her zaman çevremizde görebileceğimiz benzer uygulamalardır.
İnsan bedeninde ise fazla miktarda, daha karmaşık ve oldukça hassas kontrol işlemleri gerçekleşmektedir. Fizyolojik kontrol olarak ta adlandırılabilecek bu işlemlerden ilk akla gelenleri belirtmek gerekirse:
Kandaki şeker konsantrasyonunun sağlıklı insanlarda her zaman sabit belli bir değerde tutulması
( ki bu sistemin bozulması diyabet olarak adlandırılmaktadır). Vücut sıcaklığı çevre sıcaklığının artması durumunda terleme ( sıvı buharlaşmasının soğutma etkisiyle ) yoluyla, çevre sıcaklığı azaldığı zaman ise kıl dibi kaslarının kasılması ( ürperme ) daha da ötede kasların titremesi vasıtasıyla vücutta üretilen ısı ile çevre sıcaklığının değişimlerine karşı kontrol edilir.
Göze giren ışık şiddeti göz bebeğinin açılıp kapanması ile ayarlanır. Acı duyulduğu zaman geri çekilme refleksi, göz kas koordinasyonu ( yazı yazma ), uyuma ve uyanık kalma süreleri ( biyolojik saat ), hareket miktarı ile kalp atışlarının doğru orantılı olması, insan vücudunda örnek verilecek başlıca fizyolojik kontrol örnekleridir.
Toplumsal yaşamı doğrudan etkileyen konularda da kontrol uygulamalarına rastlanır:
Fiyat artışları, pazardaki talebin azaltılması veya paranın değerinin arttırılması ile kontrol edilebilir. Para değerini arttırmak için piyasadaki para miktarı ve kontrol edilebilen harcamalar azaltılabilir. Talebi azaltmak için ise kişilerin harcama güçleri kısılabilir. Bir diğer örnek; bir bölgenin ekonomik gelişmesinin kontrolü için verilebilir. Ekonomik gelişmeyi hızlandırmak için, o bölgeye yatırım ve nitelikli insan gücü akışını sağlamak gerekir. Bu da, özendirici ya da zorlayıcı önlemlerle sağlanabilir.
Kontrol işlemlerinin yukarıdaki örneklerdeki benzer yanlarından faydalanarak kontrol ve otomatik kontrol kavramları için şu genel tanımlamalar yapılabilir:
Kontrol: İncelenen davranışların belirli istenen değerler etrafında tutulması veya istenen değişimleri göstermesi için yapılanlar, genel anlamda kontrol işlemini tanımlar.
Otomatik Kontrol: Kontrol işlemlerinin, kontrol edilmek istenen olay etrafında kurulmuş bir karar mekanizması tarafından, doğrudan insan girişimi olmaksızın gerçekleştirilebilmesidir.
Kontrol işlemlerinin belirlenmesi ve otomatik kontrol mekanizmalarının kurulması, öncelikle bu işlemleri gerektiren amaçların ve istenen davranışların kesin biçimde tanımlanmasını, buna bağlı olarak ta, olayların oluştuğu ortamın, olayların sebep-sonuç ilişkilerinin ve davranış özelliklerinin
incelenmesini gerektirir.
Otomatik kontrol, özellikle mühendislik sistemlerinde giderek daha da çok önem kazanmaktadır. Bunun nedenleri şöyle sıralanabilir:
1) Otomatik kontrol, insanları monoton tekrarlı işlerden kurtararak zeka ve düşünebilme yeteneklerini daha iyi kullanabilecekleri işlere yönelmelerini sağlar.
2) Otomatik kontrol, insanın fizyolojik yeteneklerini aşan ( çok hızlı, çok hassas, yüksek kuvvetler gerektiren ve tehlikeli gibi ) uygulamalarda insanın hakimiyetini kolaylaştırır.
3) Otomatik kontrolün mühendislik sistemlerinde kullanılması, gerek teorik tasarım gerekse gerçekleştirme ve uygulama bakımından daha sade, daha esnek, kolayca ayarlanabilen ve yüksek verimli çözümlere imkan vermektedir.
4) Bilgisayarların mühendislik uygulamalarında yaygın biçimde kullanılması, kontrol yöntemlerinin daha etkin olarak uygulanmasına yol açmıştır.
Günümüzde en basit uygulama alanlarından en karmaşık endüstriyel tesis uygulamalarına kadar her yerde yaygın olarak kullanılan otomatik kontrol sistemleri; temelde tüm fiziksel ve kimyasal değişkenlerin insan gücüne bağlı olmaksızın denetlenmesi ve kontrol altında tutulması amacına hizmet eder.
Domestik ve Endüstriyel ortamda gerçekleştirilmiş bir otomatik kontrol sisteminden;
– Sistemin güvenliğini ve kararlılığını sağlaması
– Kolay anlaşılır, tamir edilebilir ve değiştirilebilir olması
– Sistemin performansını istenen düzeye çıkarması
– Yatırım ve işletme maliyeti açısından ucuz olması istenir.
Sistem elemanlarının seçimi ve ayarı bu ilkeler doğrultusunda yapılır. Yukarıda da belirtildiği gibi bu koşulların gerçekleştirilmesi için kontrol edilecek sistemin yapısının ve dinamik özelliklerinin çok iyi bilinmesi gerekir.
2.0 Otomatik Kontrol Türleri
Otomatik kontrol döngüsünde kontrol edici blok ( karşılaştırma ve kontrol elemanı ) yerine yerleştirilecek herhangi bir kontrol cihazı, kontrol noktası ( ayar değeri ) etrafında çalışılması gereken hassasiyette sistemi kontrol etmelidir. Prosesin gerektirdiği hassasiyette çalışacak, hatayı gereken oranda minimuma indirecek çeşitli kontrol türleri mevcuttur.
2.1 İki Konumlu Kontrol ( ON-OFF )
İki konumlu kontrol türünde; son kontrol elemanı bir konumdan değerine geçiş anı dışında ya tam açık veya tam kapalı konumdadır. Kontrol edilen değişken, kontrol noktasına geldiğinde son kontrol elemanı belirlenmiş bir konuma ( tam açık veya tam kapalı ) gelir ve kontrol edilen değişken değişmediği sürece bu konumda kalır. Kontrol edilen değişken, kontrol noktasından belirli bir düzeye uzaklaşınca son kontrol elemanı ikinci konumunu alır. Son kontrol elemanının hareketsiz kaldığı bu iki nokta arasındaki değere fark aralığı denir. Kontrol edilen değişken, fark aralığının iki sınır değerinden birine erişmediği sürece son kontrol elemanı hareket ettirilmez.
İki konumlu kontrol cihazı ile kontrol edilen bir sistemin kontrol edilen değişken-zaman eğrisi aşağıda verilmiştir.

Oransal Kontrol -P ( PROPORTIONAL)
Oransal kontrolde; nihai kontrol elemanı, kontrol edilen değişkenin değişim miktarına bağlı olarak konumlanır. Kontrol elemanının oransal bandı ( Xp ) içinde kontrol edilen değişkenin her değerine karşılık nihai kontrol elemanının bir tek konumu vardır. Başka bir deyişle kontrol edilen değişken ile nihai kontrol elemanı arasında doğrusal bir bağlantı kurularak gereksinim duyulan enerji ile sunulan enerji arasında bir denge oluşturulur.


2: PI Kontrolör Tasarımı matlab incelemesi Emeği geçen kişilere Teşekkürler
Kontrolör Tasarım Kriterleri : Tasarım kriterleri genellikle sistemine yapması gerektiğini belirtmek ve nasıl yaptığını değerlendirmek için kullanılır. Bu kriterler her bir uygulamaya özgü farklıdır ve genellikle göreli kararlık , kararlı hal doğruluğu (hata), geçici yanıt ve frekans yanıtı özellikleri ile ilgili kısımlardan oluşur. Bazı uygulamalarda parametre değişimlerine karşı duyarlılık gibi ilave kriterlerden de yararlanılır.
Tasarımın Temel İlkeleri : Belli bir kontrolör yapısını seçtikten sonra tasarımcı tüm tasarım koşullarını gerçekleyen bir kontrolör türünü, eleman değerleri ile birlikte belirlenmelidir. Kontrol sistemlerinin tasarımda kullanılabilir kontrolör türleri sadece hayal gücü ile sınırlıdır. Ancak mühendislik uygulamaları gereği tüm tasarım koşullarını sağlayan en basit yapılı kontrolör seçimi tercih edilir. Genelde kontrolörün karmaşıklığı arttıkça maliyeti de artar. Güvenilirliği azalır ve tasarımı güçleşir. Belirli bir uygulamaya göre kontrolör seçimi genellikle tasarımcıya bırakılır. Tasarımcı bu seçimi yaparken geçmiş deneyimlerine, önsezilerine ve tasarım hünerinden yararlanır.
Bu doğrultuda kontrolör seçilir ve ikinci adımda da kontrolör parametre değerleri belirlenmedir. Bu parametre değerleri kontrolörü oluşturan bir yada daha fazla transfer fonksiyonuna ilişkin katsayılardır. Temel tasarım yaklaşımı analiz araçlarından yararlanarak bireysel parametrelerin tasarım koşullarını ve netice de sistem davranışını nasıl etkilediğini belirlemektedir.
Bu bilgilere dayanılarak tasarlanacak kontrolör de tüm bu verilerden yararlanacaktır. Bu işlem çok basit olmasına rağmen genellikle kontrolör parametrelerinin birbirlerini ve özellikler tasarım kriterlerini çelişkili bir şekilde etkilemesi nedeni ile, çok sayıda tasarım adımının atılmasını gerektirebilir. Örneğin belirli bir parametre değeri seçilip aşım sağlanabilir, ancak yükselme zamanı seçildiğinde aşım kriteri sağlanmayabilir.
Şüphesiz ki tasarım kriterleri ve kontrolör parametrelerinin sayısı arttıkça tasarım işlemi de karmaşıklaşır.
Diğer kontrol ünitelerinde kontrolör sabit kazançlı basit bir kuvvetlendiriciden oluşmaktaydı. Bu tür kontrol işleminde, kontrol işareti kontrolör çıkışına sabit bir oranla aktarıldığından oransal kontrol olarak adlandırılırlar. Sezgisel olarak , bu kazanç katı türev alma, integral alma gibi işlevlerden yaralanarak oluşturulabilir. Buna göre bu sistemin içerisinde toplayıcı, kuvvetlendirici, zayıflatıcı, türev ve integral alıcı kısımlar bulunabilir. Burada tasarımcının görevi bu kazanç katlarının hangi oranda ve ne şekilde bağlanacağını tespit etmektir.
PI Kullanımı ile İlgili Örnek Devre PI Kontrollü Hız Denetimi
Açık döngülü sistemle motor hız kontrolünde devir sayısı ayarı endüvi veya uyartım sargısı üzerine düşen gerilimi değiştirmekle ayarlanabilir. Açık döngülü sistemde motor gerilimindeki ve motor devir sayısındaki değişiklikler dikkate alınmamaktadır. Bu yöntemde, yük durumuna göre devir artar veya azalır. Bu nedenle sabit hız uygulamalarında açık döngülü sistem kullanılamaz.
Kapalı döngü sistemle motor hız kontrolünde, çıkış büyüklüğü sistem değişkenlerinden bağımsız hale getirilir. Şekilde kurulan döngü sayesinde çıkış büyüklüğü olan motor devri sayısı (hızı) sabit tutulmak istenmektedir.

PI kontrolör tasarlanırken öncelikle kullanılacak sistem belirlenmelidir. Uygun yaklaşımda bulunmak için uygun değerler seçilmelidir. Büyük sistemlerde büyük Ki ve Kp, küçük sistemlerde küçük Ki ve Kp seçilmelidir.
Kp ve Ki seçilirken transfer fonksiyonuna önem verilmelidir. Yani tasarlanacak sisteme göre Ki ve Kp sabitleri koyulmalıdır.
3: PID kontrolörleri ile tasarım Emeği geçen kişilere Teşekkürler
Özet:Bu konuda, PI, PD, PID kontrolörleri ile tasarım, hem zaman tanım aralığında hem de frekans tanım aralığında ele alınarak incelenmiştir. Ayrıca ek olarak ise matematik modeli olmayan sistemlerde PID kontrolörünün nasıl gerçekleştirilebileceği özetlenmiştir.
Tasarım aşamasına geçmeden önce bazı tanımlamaların ele alınması gerekmektedir. Kontrol sistem tasarımı üç adımdan oluşur:
1. Sistemin ne yapması ve nasıl yapması gerektiğinin belirlenmesi (tasarım kriterleri).
2. Kontrolör yapısının kontrol edilen sisteme nasıl bağlanacağının belirlenmesi.
3. Kontrolör parametrelerinin tasarım hedeflerine göre belirlenmesi.
1. Tasarım Kriterleri : Tasarım kriterleri her uygulamaya göre farklılık gösterir ve genellikle göreli kararlılık, kararlı hal hatası, geçici yanıt ve frekans yanıtı ile ilgili kısımlardan oluşur. Lineer kontrol sistemlerinin tasarımı zaman yada frekans tanım bölgelerinde gerçekleştirilebilir. Örneğin kararlı hal hatası genellikle birim basamak, rampa yada parabolik giriş için tanımlanır. Belirli tasarım kriterleri zaman tanım aralığında çok kolay değerlendirilebilir. En büyük aşım, yükselme zamanı ve yerleşme zamanı gibi birim basmak giriş için tanımlanan kriterler genellikle zaman tanım bölgesi tasarımında kullanılır. Göreli kararlılık kazanç payı, faz payı ve rezonans tepesi gibi büyüklüklerle ölçülür. Bu tip frekans tanım bölge kriterleri Bode diyagramı, kutupsal yer eğrisi, genlik faz eğrisi ve Nichols abağı ile birlikte kullanılırlar.
Lineer sistemlerin tasarımında Bode, Nyquist, genlik-faz eğrisi ve Nichols abağı gibi yöntemler yaklaşık çizimlerde ayrıntıya gerek duymazlar. Böylece kazanç payı, faz payı, rezonans tepesi gibi frekans tanım bölgesi kriterlerinden yararlanılarak yüksek mertebeden sistemler bile tasarlanabilir. Diğer taraftan, zaman tanım bölgesinde yükselme zamanı, gecikme zamanı, yerleşme zamanı, aşım vs. gibi davranış kriterleri sadece ikinci mertebeden sistemlerde anlitik tasarlanabilir, yada ikinci mertebeden sistemler cinsinden yaklaşık ifade edilebilir.
2. Kontrolör yapıları

Şekil-1. Kontrol sistem dinamiği
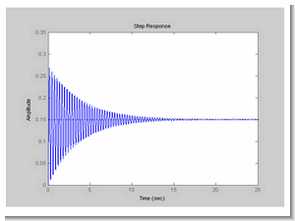
Birim Basamak Yanıtı ve Zaman Tanım Bölgesi Kriterleri
Geçici hal, daha önce belirtildiği gibi, sistem yanıtının zaman ilerledikçe sıfıra giden kısmı olarak tanımlanır. Bir kontrol sisteminde geçici hal yanıtının genliği ve süresi katlanabilir bir sınırın altında tutulmalıdır.
Doğrusal kontrol sistemlerinde geçici hal yanıtının değerlendirilmesi genellikle us(t) birim basamak yanıtından yararlanılarak yapılır. Kontrol sisteminin birim basamak girişe cevabı birim basamak yanıtı olarak adlandırılır. Şekil-3 de doğrusal bir kontrol sisteminin örneksel birim basamak yanıtı görülmektedir.

PID Kontrolörüyle Tasarım : Önceki tartışmalarda PD kontrolünün sisteme zayıflama getirdiği ancak sistemin kararlı hal davranışını etkilemediği görülmüştü. PI kontrolörünün ise, göreli kararlılığı ve aynı zamanda kararlı hal hatalarını düzelttiği, ancak yükselme zamanının arttığı belirtilmişti. Bu sonuçlar bizi, PI ve PD kontrolörlerinin iyi yönlerinden yararlanmayı sağlayan, PID kontrolünü kullanmaya yöneltir.
PI PID Kontrolörleri ile Tasarım kaynakları;
Şifre-Pass: 320volt.com
Yayım tarihi: 2008/12/06 Etiketler: Matlab, otomatik kontrol, pi devre, PI Kontrol, pid devre, pid kontrol, tasarım
Çok güzel bir konuya değinmişsiniz. Verdiğiniz bilgiler için çok teşekkürler.
Gerçekten çok teşekürler. Uzun zamandır böyle bir bilgi arıyordum.
Ager
PID konusu gerçekten çok ilgi duyduğum bir konu. Ama bilgilerim teorik bilgiden öteye gidemiyor maalesef. İş basit gibi gözüksede uygulamada ortaya değişik varyasyonlar çıkmaktadır. Bu nedenle işi iyi bilen birileri ile bir sistem tasarlamayı hep istemişimdir. Mesela burada bir basit elektrikle ısıtılan bir fırının sıcaklığını PID mantığı ile kontrol edelim derim.
PID mekanizmasını yada kontrol mantığını anlayabilmek için iyi bir deneme olabilir ve bir çok kişiye yardımcı olabilir.
İşi ben birazcık başlatayım gerisini bilenler devam ettirsin. Gerekirse açıklananları ben PicBasic de program haline getiririm. Yada açıklamaları program senaryosu haline getiririz ve isteyen kendi dilinde programını yazar.
Öncelikle bir fırının ısıtma sistemine değinelim. Fırın içinde yerleşik diyelimki 2000 wattlık bir rezistans ile ısıtılacaktır. Fırın sıcaklığı 0-250 derece santigrad arasında ayarlanabilir olacak ve sıcaklık kontrolü PID mekanizması ile yapılacaktır.
Burada ortaya rezistansın nasıl sürüleceği sorusu çıkmaktadır. Elimizdeki alternatifler:
1. Bir röle ile sürersek yalnızca aç/kapa yaptırarak rezistansı kontrol edebiliriz.
2. Rölenin işini bir Triac’a verip yine aç kapa şeklinde rezistansı kontrol edebiliriz.
3. Triac ın açılmasını bir sıfır geçiş kontrol sistemi yaparak dimmer mantığına göre yapar ve böylece rezistansın sürülme zamanını kontrol ederek ısınını ayarlayabiliriz.
4. Yada son çare olarak bir PWM sinyali ile rezistansa verilen volajı kontrol edebiliriz. Normalde AC voltajı PWM sinyali ile sürmek zor gözüküyor. Çünki yine işin içine sıfır geçiş kontrolünü koyup pwm sinyalini buna senkron çalıştırmak yada AC volatjı DC ye çevirip rezistansa PWM kontrollü DC gerilim uygulamak gerekir.
İşe kontrolün nasıl yapılacağı ile başlayabiliriz.
Daha sonra burada program yazmaktan ziyade kontrol mekanizması nasıl oluşturulacak onun üzerinde tartışıp uygun yolu belirlememiz gerekir.
PID sisteminde en önemli olaylardan biriside PID parametrelerinin tespitidir. Teoride hep bir Kp , Ki ve Kd parametrelerinden bahsedilir. Parametrelerin belirlenmesi için yine bazı yöntemlerden bahsedilir Mesela Nicholas… metodu gibi ama bu bilgilerde teorik dir. Piyasada PID sistemini uygulayan pek çok cihazda bu parametreleri daha kolay tayin etmenizi sağlayan yöntemler uygulanıyor.
Mutlaka bu işin bir pratik yolu olması gerekir diye düşünüyorum. En güzelide deneme yanılma olsa gerek. Bu konu üzerinde de durmalıyız sanırım.
Bu kontrolü sonuçta triac üzerinden yapacağımızı düşünüyorum. Dolayısıyla bundan sonraki adımda kontrol mekanizmasını nasıl kuracağız ve bunu programa nasıl adapte edeceğiz bu konu üzende çalışıp işi sonuca bağlayabiliriz sanırım.
PID konusunda aslında bayağı bilgi yüküm var. Ben bu işin eğitimini almadım. Bütün bilgim sürekli bu konuyu takip etmeye dayanıyor. Epeyce denemede yaptım ama hiç birisini fiziki olarak hayata geçiremedim. Sürekli bir yerlerde tıkandım kaldım. Umarım bu işi burada bir yerlere getirebiliriz.
Benden şimdilik bu kadar konunun açılmasına paralel olarak aralara giriş yapacağım.
Cevapları merakla bekliyorum
Ete
Desteğiniz için Çok Teşekkürler ETE Hocam sayenizde bir çok kişi elektronik özellikle picbasic konusunda bilgi sahibi oldu kendini geliştirdi umarım uzun yıllar böylede sürecek Sevgiler Saygılar iyi çalışmalar
ete hocam ben elektrik öğretmenliğinde okuyorum. elektroniğe ilgi duyuyorum. Ancak bölümüm gereği ayrıntılı elektronik göremiyorum.Ayrıca çalışmaktayım bu yoğınluk içerisinde bana verilen bir ödev ile alakalı problem yaşamaktayım. ödevimin konusu ” Bir uzay aracının konumu için PID Kontrolüyle zaman ve frekans tanım bölgesinde tasarımı”dır. (Uzay aracı haricinde herhangi bir cihaz kontrolüde olabilir)Bu konu ile ilgili yaptığım araştırmalarda bazı parametrelere ihtiyaç olduğunu gördüm,ödevin çözüm yöntemiyle alakalı net bilgilere ulaşamadım.Konuyla ilgili geniş bilgiye de sahip değilim.Bu konuda yazmış olduğunuz bilgilere binaen bana yardımcı olabileceğinizi ümit etmekteyim.Ödevi bir ay içerisinde teslim etmem gerekiyor.Yardımlarınızı acil olarak beklemekteyim.Şimdiden teşekürler.
merabalar ;
PİD sistem ile ilgili teorik bir sorum olacaktı yardım edebilirseniz çok sevinirim.
şu şekilde bir block diyagram mevcut giriş > ardından pid sistem> onun ardından (6/s^+3s+11) li bir ifade mecut ve sistemi çıkışı girişine geri besleme yapılmış.
pid=(ki/s + kd.s +kp) şeklinde verilmiş. sistem kararlı halde ve bizden dısarıdan müdahale yaparak bir (s+a) şeklınde bir kutup daha eklememiz istenmiş ve sisteme eklenilen kutbun sistemin kararlı halini bozmaması isteniyor . eklenecek olan 3. kutbun pid sistemdeki ki, kd, kp katsayılarını nasıl etkiler ? teşekkürler
Otomatik kontrol sistemleri tasarımı, kontrolör tasarımı hakkında sunum hazılarlamak istiyorum ve bu bilgilerin yanında video destekli bir şeyler yapmak istiyorum veya basit bir devre yapabilmemi sağlayabilirsenız sevinirim. Ben yıldız teknikte makine mühendisliği okuyorum ama daha hazırlıktayım ve bun konular şimdiden ilgimi çekiyor. şimdiden teşekkur ederim.